4.2.8 Идеальный шарнир
 Шарнир соединяет два звена и имеет две степени свободы. Шарнир является идеальным шарниром равных угловых скоростей и представлен на Рис. 81. Оси передачи вращения шарнира заданы точкой Point и векторами Vector1 и Vector2. В модели используются копии этих объектов Point*, Vector1* и Vector2*. Точка Point* и вектор Vector1* прикрепляются к первому звену. Вектор Vector2* прикрепляется ко второму звену.
Шарнир соединяет два звена и имеет две степени свободы. Шарнир является идеальным шарниром равных угловых скоростей и представлен на Рис. 81. Оси передачи вращения шарнира заданы точкой Point и векторами Vector1 и Vector2. В модели используются копии этих объектов Point*, Vector1* и Vector2*. Точка Point* и вектор Vector1* прикрепляются к первому звену. Вектор Vector2* прикрепляется ко второму звену.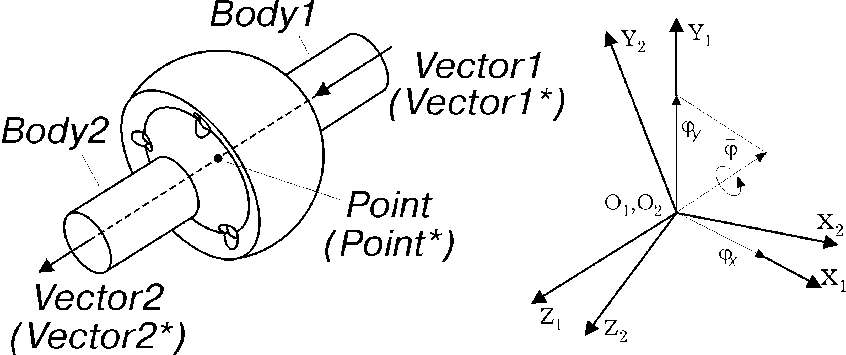
Рис. 81. Идеальный шарнир
Синтаксис метода создания
ideal(Body1, Body2, Point, Vector1, Vector2, freeze=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Body1
Имя первого звена шарнира.
body Body2
Имя второго звена шарнира.
point Point
Исходная точка, задающая центр шарнира. Копия этой точки Point* прикрепляется к первому звену. Точка Point* задает центр вращения в процессе движения исследуемого механизма.
vector Vector1
Исходный вектор, задающий направление оси передачи вращения первого звена. Копия этого вектора Vector1* прикрепляется к первому звену. Вектор Vector1* задает направления оси передачи вращения первого звена в процессе движения исследуемого механизма.
vector Vector2
Исходный вектор, задающий направление оси передачи вращения второго звена. Копия этого вектора Vector2* прикрепляется ко второму звену. Вектор Vector2* задает направления оси передачи вращения второго звена в процессе движения исследуемого механизма.
Необязательные именованные параметры метода
Параметры являются общими для всех методов создания шарниров и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Шарнир (joint)» главы «Основные объекты».
Описание
При переводе проекта из режима редактирования в режим исследования в шарнире производятся следующие действия.
1. Создается узел O1X1Y1Z1 (см. Рис. 81), который прикрепляется к звену Body1. Центр этого узла O1 совпадает с точкой Point*. Ось Z1 совпадает с вектором Vector1*.
2. Создается узел O2X2Y2Z2 (см. Рис. 81), который прикрепляется к звену Body2. Центр этого узла O2 совпадает с точкой Point*. Ось Z2 совпадает с вектором Vector2*.
В процессе движения исследуемого механизма центры узлов O1 и O2 совпадают.
Внутренние системные объекты
sensor fiX [angle], sensor fiY [angle]
Приведенные параметры Эйлера  ,
,  определяют поворот узла второго звена шарнира относительно узла первого звена (см. Рис. 81).
определяют поворот узла второго звена шарнира относительно узла первого звена (см. Рис. 81).