5.1.17 Модуль силы
 Значением датчика является абсолютная величина вектора силы, действующего на звено со стороны механической связи (силовой элемент, шарнир или программное движение).
Значением датчика является абсолютная величина вектора силы, действующего на звено со стороны механической связи (силовой элемент, шарнир или программное движение).Размерность значения датчика - [force].
Датчик является не дифференцируемым по параметрам положения механизма.
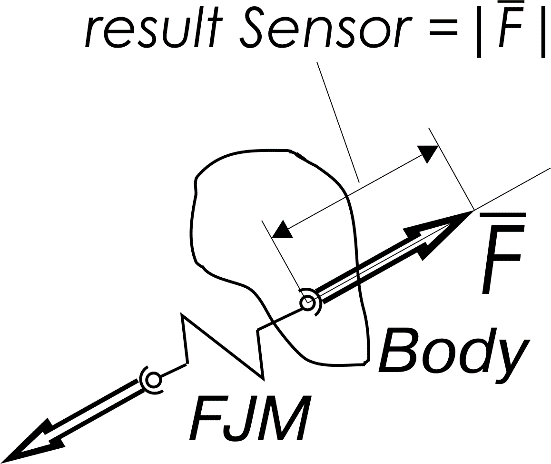
Рис. 134. Абсолютная величина вектора силы от механической связи
Синтаксис метода создания
magnitudeF (FJM, Body, valueAveraging=...)
Обязательные позиционные параметры метода
force/joint/motion FJM
Имя механической связи (силового элемента, шарнира или программного движения).
body Body
Имя звена.
Необязательные именованные параметры метода
 valueAveraging = scalar [-]
valueAveraging = scalar [-]Количество шагов интегрирования, используемых для усреднения значения. Значение 0 соответствует отсутствию усреднения. По умолчанию valueAveraging = 0.