5.1.19 Проекция силы
 Значением датчика является проекция вектора силы, действующего на звено со стороны механической связи (силовой элемент, шарнир или программное движение). Проекция осуществляется на вектор, зависящий от заданного значения необязательного именованного параметра fixingVector = … . Если параметр fixingVector = lockVector: или его значение не задано, то значением датчика является проекция вектора силы на вектор Vector*. Если параметр fixingVector = unlockVector:, то значением датчика является проекция вектора силы на вектор Vector.
Значением датчика является проекция вектора силы, действующего на звено со стороны механической связи (силовой элемент, шарнир или программное движение). Проекция осуществляется на вектор, зависящий от заданного значения необязательного именованного параметра fixingVector = … . Если параметр fixingVector = lockVector: или его значение не задано, то значением датчика является проекция вектора силы на вектор Vector*. Если параметр fixingVector = unlockVector:, то значением датчика является проекция вектора силы на вектор Vector.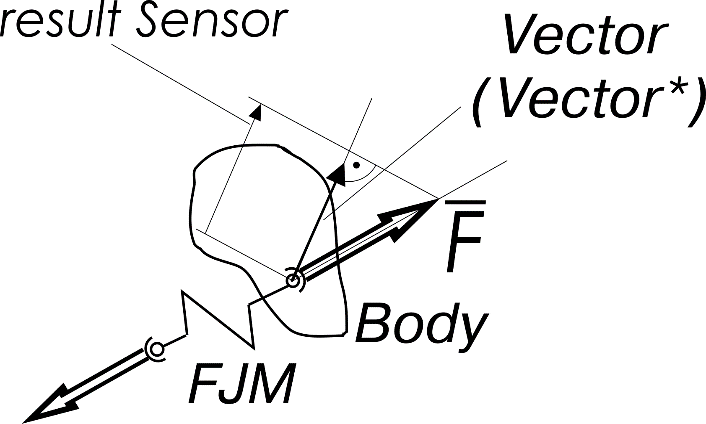
Рис. 136. Проекция вектора силы от механической связи
Если у датчика необязательный именованный параметр fixingVector = lockVector: или его значение не задано, то при переводе проекта из режима редактирования в режим исследования создается вектор Vector*, который прикрепляется к звену Body. Вектор Vector* является копией заданного вектора Vector и совпадает с ним в момент создания.
Если объект Vector не прикреплен к звену, то на виде проекта этот объект не перемещается вместе с механизмом в процессе его движения. Копия объекта Vector* является внутренним системным объектом и не отображается на виде проекта.
Размерность значения датчика - [force].
Датчик является не дифференцируемым по параметрам положения механизма.
Синтаксис метода создания
projectionF(FJM, Body, Vector, fixingVector=..., valueAveraging=...)
Обязательные позиционные параметры метода
force/joint/motion FJM
Имя механической связи (силового элемента, шарнира или программного движения).
body Body
Имя звена.
vector Vector
Исходный вектор для проецирования вектора силы, действующей на звено Body со стороны внешнего воздействия FJM. При необходимости создается копия этого вектора Vector* и прикрепляется к звену Body.
Необязательные именованные параметры метода
fixingVector = [lockVector:/unlockVector:]
Параметр определяет, какой из векторов используется для проекции. Им может быть исходный вектор или вектор, который создается по исходному вектору и прикрепляется к звену, определяемому по необязательному именованному параметру bodyFixVector. Положение исходного вектора относительно первого и второго звена может изменяться в процессе движения механизма. По умолчанию fixingVector = lockVector:.
 fixingVector = lockVector:
fixingVector = lockVector:Для проекции используется вектор, который создается по исходному вектору и прикрепляется к звену, определяемому по необязательному именованному параметру bodyFixVector, при переводе проекта в режим исследования.
 fixingVector = unlockVector:
fixingVector = unlockVector:Для проекции используется исходный вектор, положение которого относительно первого и второго звена может изменяться в процессе движения механизма.
 valueAveraging = scalar [-]
valueAveraging = scalar [-]Количество шагов интегрирования, используемых для усреднения значения. Значение 0 соответствует отсутствию усреднения. По умолчанию valueAveraging = 0.
Описание
При переводе проекта из режима редактирования в режим исследования, если именованный параметр fixingVector = lockVector: или его значение не задано, создается вектор Vector*. Он прикреплен к звену Body и в момент создания совпадает с вектором Vector. Для проецирования ветора силы, действующей на звено Body со стороны внешнего воздействия FJM, используется вектор Vector*.
Если параметр fixingVector = unlockVector:, для проецирования ветора силы, действующей на звено Body со стороны внешнего воздействия FJM, используется исходный вектор Vector.