5.1.38 Следящий датчик с зазором
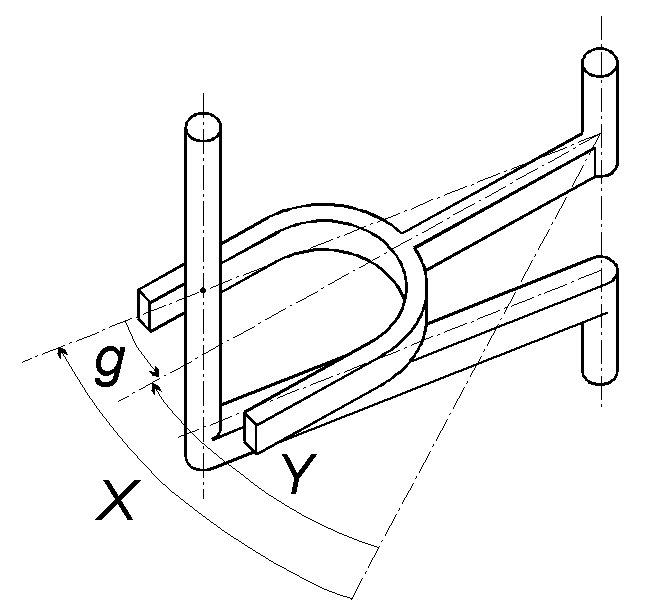
 Датчик осуществляет слежение с зазором (с люфтом) за значением исходного датчика.
Датчик осуществляет слежение с зазором (с люфтом) за значением исходного датчика.Размерность значения датчика равна размерности исходного датчика.
Датчик является не дифференцируемым по параметрам положения механизма.
 |
|
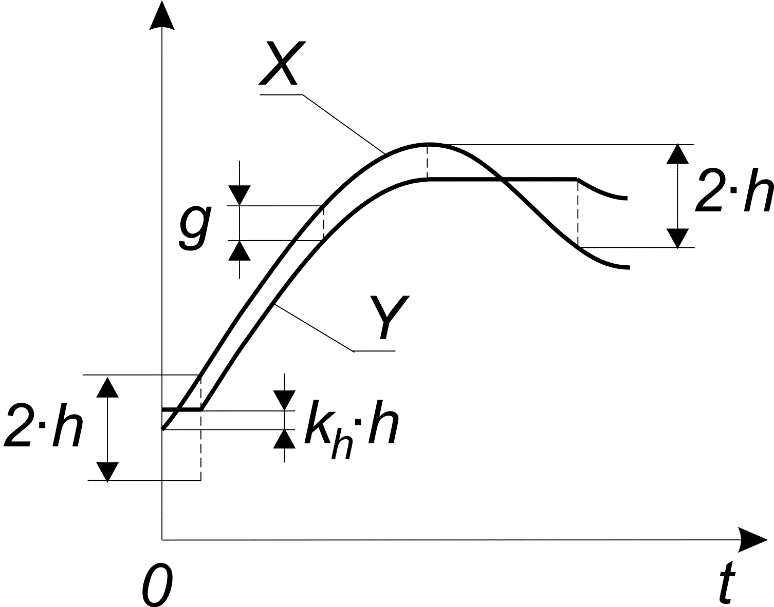 |
Рис. 141. Следящий датчик с зазором
Синтаксис метода создания
backlash(X, h, k_h = ...);
Обязательные позиционные параметры метода
sensor X
Исходный датчик; может иметь любую размерность.
scalar h
Предельное значение зазора – максимальное отклонение значения исходного датчика от значения следящего датчика, допускаемое зазором. Равно полуширине общего люфта. Имеет размерность такую же, как у датчика X.
Необязательные именованные параметры метода
 k_h = scalar [-]
k_h = scalar [-]Коэффициент начального отклонения. Может принимать значения от -1 до 1. При k_h = 0 [-] созданный датчик находится в середине люфта. При k_h = ±1 созданный датчик находится в крайних точках люфта. По умолчанию k_h = 0 [-].
Описание
В начальный момент времени отклонение  исходного датчика от созданного равно
исходного датчика от созданного равно
где  – величина начального отклонения,
– величина начального отклонения,  – максимальное отклонение (равно полуширине люфта),
– максимальное отклонение (равно полуширине люфта),  – коэффициент начального отклонения.
– коэффициент начального отклонения.
В остальные моменты времени:
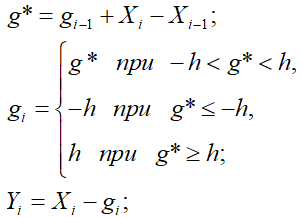
где  – отклонение на предыдущем шаге интегрирования,
– отклонение на предыдущем шаге интегрирования,  – отклонение на текущем шаге интегрирования, .. – значение исходного датчика на текущем шаге интегрирования, .
– отклонение на текущем шаге интегрирования, .. – значение исходного датчика на текущем шаге интегрирования, . . – значение исходного датчика на предыдущем шаге интегрирования,
. – значение исходного датчика на предыдущем шаге интегрирования,  – значение следящего датчика на текущем шаге интегрирования.
– значение следящего датчика на текущем шаге интегрирования.
Данный датчик можно использовать для моделирования движения безынерционного элемента с сухим трением, на который действует упругая пружина и некоторая произвольная сила. Элемент можно считать безынерционным, если частота его собственных колебаний на упругой пружине значительно выше частот, представляющих интерес для моделирования, и движение элемента достаточно хорошо демпфируется. Координата равновесного положения элемента в каждый момент времени, при условии отсутствия сухого трения, определяется следующим образом
где  – значение произвольной силы, действующей на элемент;
– значение произвольной силы, действующей на элемент;  – коэффициент жесткости упругой пружины;
– коэффициент жесткости упругой пружины;  – координата равновесного положения элемента при
– координата равновесного положения элемента при  .
.
Используя  как исходный датчик, истинное положение элемента при наличии сухого трения можно определить как следящий датчик с зазором при предельном значении зазора
как исходный датчик, истинное положение элемента при наличии сухого трения можно определить как следящий датчик с зазором при предельном значении зазора
где  – величина предельной силы сухого трения элемента.
– величина предельной силы сухого трения элемента.
В качестве примера безынерционного элемента с сухим трением можно привести золотник в гидрорегуляторе, представленный на Рис. 142.
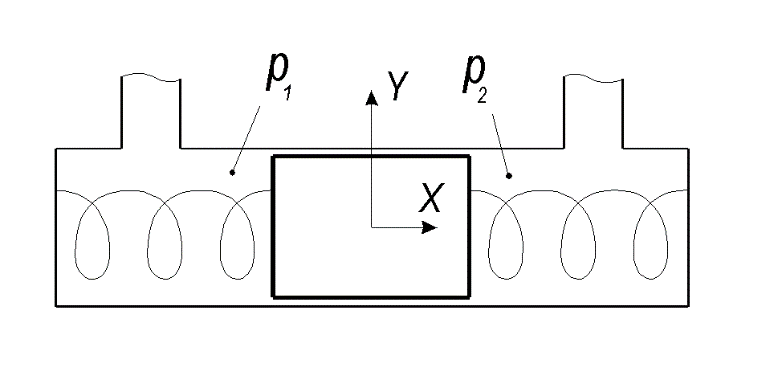
Рис. 142. Золотник в гидрорегуляторе
Золотник может поступательно перемещаться вдоль оси  . На торцы золотника действуют одинаковые упругие пружины с коэффициентом жесткости
. На торцы золотника действуют одинаковые упругие пружины с коэффициентом жесткости  и давления жидкости
и давления жидкости  ,
,  в качестве произвольной силы. Предполагается, что давления на торцах золотника изменяются во времени, но их значения в каждый момент времени известны. Равновесное положение золотника в каждый момент времени, при условии отсутствия сухого трения, определяется следующим образом
в качестве произвольной силы. Предполагается, что давления на торцах золотника изменяются во времени, но их значения в каждый момент времени известны. Равновесное положение золотника в каждый момент времени, при условии отсутствия сухого трения, определяется следующим образом
где  – площадь торца золотника;
– площадь торца золотника;  – координата равновесного положения элемента при
– координата равновесного положения элемента при  .
.
Используя  как исходный датчик, истинное положение золотника при наличии сухого трения можно определить как следящий датчик с зазором при предельном значении зазора
как исходный датчик, истинное положение золотника при наличии сухого трения можно определить как следящий датчик с зазором при предельном значении зазора
где – величина предельной силы сухого трения золотника.