5.1.43 Относительное положение узлов
 Данный метод создает не один датчик, а массив датчиков. Поэтому тип объекта, создаваемого этим методом, записывается в файле проекта не sensor, а sensor_array.
Данный метод создает не один датчик, а массив датчиков. Поэтому тип объекта, создаваемого этим методом, записывается в файле проекта не sensor, а sensor_array.Относительное положение узлов описывается координатами центра узла Node2 в осях узла Node1 и матрицей направляющих косинусов.
Матрица направляющих косинусов представляет собой ориентацию узла Node2 относительно узла Node1 и имеет следующий вид:
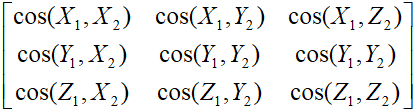 .
.Датчики массива являются дифференцируемыми по параметрам положения механизма, если узлы Node1 и Node2 прикреплены к звеньям.
Синтаксис метода создания
positionNN(Node1, Node2)
Обязательные позиционные параметры метода
node Node1
Первый узел.
node Node2
Второй узел.
Внутренние системные объекты
sensor x [length]
Координата X центра узла Node2 в осях узла Node1.
sensor y [length]
Координата Y центра узла Node2 в осях узла Node1.
sensor z [length]
Координата Z центра узла Node2 в осях узла Node1.
sensor cosX1X2 [-]
Косинус угла между осью X узла Node1 и осью X узла Node2.
sensor cosY1X2 [-]
Косинус угла между осью Y узла Node1 и осью X узла Node2.
sensor cosZ1X2 [ -
Косинус угла между осью Z узла Node1 и осью X узла Node2.
sensor cosX1Y2 [-]
Косинус угла между осью X узла Node1 и осью Y узла Node2.
sensor cosY1Y2 [-]
Косинус угла между осью Y узла Node1 и осью Y узла Node2.
sensor cosZ1Y2 [-]
Косинус угла между осью Z узла Node1 и осью Y узла Node2.
sensor cosX1Z2 [-]
Косинус угла между осью X узла Node1 и осью Z узла Node2.
sensor cosY1Z2 [-]
Косинус угла между осью Y узла Node1 и осью Z узла Node2.
sensor cosZ1Z2 [-]
Косинус угла между осью Z узла Node1 и осью Z узла Node2.