5.3.1 Идеальный канал
 Данное программное движение обеспечивает такое движение механической системы, при котором выполняется условие:
Данное программное движение обеспечивает такое движение механической системы, при котором выполняется условие:где  ,
,  – значения заданных датчиков;
– значения заданных датчиков;  – заданная функция.
– заданная функция.
Размерность значения функции должна совпадать с размерностью значения датчика . Функция может иметь не более одного аргумента. Размерность значения аргумента должна совпадать с размерностью значения датчика . Если функция не имеет аргумента, то при включенном программном движении значение датчика будет сохранять постоянное значение.
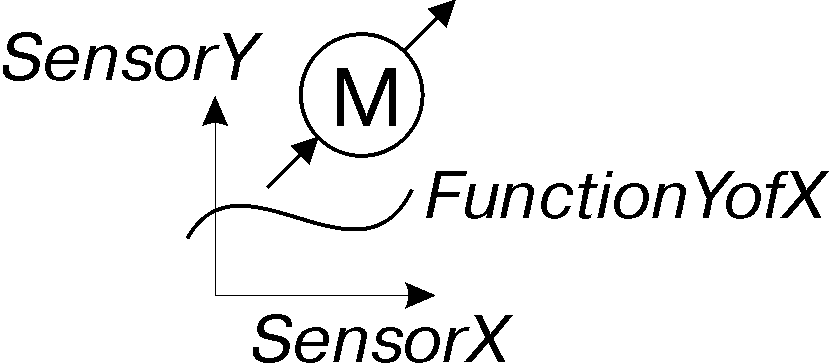
Рис. 147. Идеальный канал
Каждый датчик в EULER характеризуется уровнем зависимости. В частности, можно выделить следующие уровни зависимости датчика.
− Время
− Положение
− Скорость
− Ускорение
Старшим считается уровень с большим номером.
Датчик может иметь уровень зависимости положение, скорость или ускорение. Датчик и функция должны быть дифференцируемыми  раз, где
раз, где  – номер уровня зависимости датчика .
– номер уровня зависимости датчика .
Датчик может иметь уровень зависимости время, положение, скорость или ускорение, но уровень зависимости датчика не должен превосходить уровня зависимости датчика . Совпадение уровней зависимости датчиков и допускается.
Датчик должен быть дифференцируемым  раз, где
раз, где  – номер уровня зависимости датчика .
– номер уровня зависимости датчика .
Синтаксис метода создания
ideal2(FunctionYofX, SensorY, SensorX, work=...)
Обязательные позиционные параметры метода
function FunctionYofX
Функция, которая задает программу регулирования.
sensor SensorY
Датчик, значение которого регулируется программным движением.
sensor SensorX
Датчик, значение которого используется как аргумент в программе регулирования.
Необязательные именованные параметры метода
work =...
Параметр является общим для всех методов создания программных движений и описан в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Программное движение (motion)» главы «Объекты контроля и управления».