6.6.3 Используемые элементами атрибуты
color=“string”
Для описания цвета геометрического примитива доступны следующие методы:
− “RGB, R, G, B” – цвет примитива; R, G, B – интенсивность красного, зеленого и синего цвета; каждая компонента представляется целым числом от 0 до 255.
center=“string”
Для описания положения центра примитива доступны следующие методы:
− “x0, y0, z0” – координаты центра примитива в локальной системе координат примитива.
MIP=“string”
Для описания массово-инерционных характеристик примитива доступны следующие методы:
− “MIP, xMC, yMC, zMC, mass, Jxx, Jyy, Jzz, Jxy, Jxz, Jyz” – массово-инерционные характеристики примитива (Mass-Inertia Properties), xMC, yMC, zMC – координаты центра масс в локальной системе координат примитива, mass – масса, Jxx, Jyy, Jzz, Jxy, Jxz, Jyz – компоненты тензора инерции, определенные относительно центра масс в локальной системе координат:
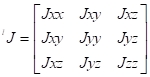 .
.LCS=“string”
Для описания матрицы перехода от локальной системы координат примитива или структуры к системе координат родительской структуры доступны следующие методы:
− “CS, x0, y0, z0, xXCS, yXCS, zXCS, xYCS, yYCS, zYCS, xZCS, yZCS, zZCS” – матрица перехода от локальной системы координат примитива или структуры к системе координат родительской структуры (Local Coordinate System), описанная с помощью вектора сдвига и матрицы поворота, записанной по столбцам:
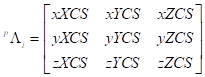 .
.По умолчанию LCS=”CS, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1” – системы координат совпадают, что соответствует отсутствию сдвига и поворота.
MCS=“string”
Для описания матрицы перехода от системы координат прототипа примитива или структуры к системе координат родительской структуры доступны следующие методы:
− “CS, x0, y0, z0, xXCS, yXCS, zXCS, xYCS, yYCS, zYCS, xZCS, yZCS, zZCS” – матрица перехода от системы координат прототипа примитива или структуры к системе координат родительской структуры (Model Coordinate System), описанная с помощью вектора сдвига и матрицы поворота, записанной по столбцам:
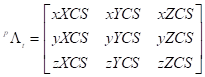 .
.Если в прототипе определен атрибут LCS, то он определяет переход от локальной системы координат объекта к системе координат прототипа:  ,
,
template=“string”
Имя прототипа примитива или структуры для создания объекта по ссылке на прототип.
file=“string”
Имя файла, содержащего примитив или структуру, для создания объекта по ссылке на файл.