7 Общая постановка задач идентификации параметров
Идентификация параметров представляет собой задачу определения их значений в модели механической системы, при которых характеристики поведения модели наилучшим образом соответствуют имеющимся результатам измерений функционирования эталонной механической системы. В зависимости от содержательной постановки решаемой задачи под эталонной системой понимается реальная механическая система или некоторый, в том числе теоретический, прототип.
Характеристики функционирования механической системы, используемые для определения соответствия поведения модели и эталона, будем называть характеристиками идентификации или измеряемыми характеристиками. В качестве характеристик идентификации могут служить различные кинематические параметры движения (положения, скорости, ускорения), возникающие силовые воздействия и другие характеристики работы механических систем. В качестве идентифицируемых параметров могут выступать параметры конструкции механизма, задания силовых воздействий, начальных условий движения и другие параметры, оказывающие влияние на процесс функционирования системы.
Задача идентификации решается в следующей постановке.
− Имеются результаты измерений характеристик идентификации, полученные в процессе функционирования эталонной механической системы. Эти результаты должны быть представлены в виде функций процесса функционирования системы. Результаты этих измерений обозначим
где  –
–  -я характеристика идентификации, замеренная в эталонной механической системе;
-я характеристика идентификации, замеренная в эталонной механической системе;
− Имеется представление эталонной механической системы в виде модели ММС. В модели могут измеряться значения тех же характеристик идентификации, что и в эталонной системе. Характеристики в модели обозначим
где  – -я характеристика идентификации, полученная в модели.
– -я характеристика идентификации, полученная в модели.
Характеристики, полученные в модели, определяются процессом функционирования модели и зависят от значений идентифицируемых параметров.
− Необходимо определить значения идентифицируемых параметров, при которых полученные в модели характеристики поведения механической системы ближе всего к результатам измерений функционирования эталонной механической системы.
Обозначим вектор идентифицируемых параметров как
где  – количество идентифицируемых параметров.
– количество идентифицируемых параметров.
Для идентификации обычно используются данные измерения характеристик системы в процессе ее функционирования. В зависимости от содержательной постановки задачи идентификации они могут быть получены в результате:
− замеров на одной траектории движения;
− замеров результатов на совокупности нескольких траекторий движения;
− замеров характеристик в различных состояниях системы.
Будем считать, что число замеров для всех характеристик идентификации одинаково и равно  .
.
Соответствие поведения модели механической системы имеющимся результатам измерений функционирования эталонной ММС определяется на основе критерия. В качестве такого критерия принимается сумма квадратов расхождений значений характеристик модели и эталона, вычисляемая как
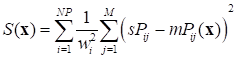 ,
,где  – значение -й характеристики идентификации в эталонной механической системе в
– значение -й характеристики идентификации в эталонной механической системе в  -м замере;
-м замере;
Коэффициенты эквивалентности используются для приведения значений расхождений к безразмерному виду. Значения коэффициентов эквивалентности задаются пользователем. Они определяют относительную важность характеристик для идентификации параметров. Чем больше значение коэффициента эквивалентности, тем менее важна характеристика. То есть, если в модели идентифицируются, например, две характеристики – масса  и скорость
и скорость , то задание их коэффициентов эквивалентности, как
, то задание их коэффициентов эквивалентности, как  и
и  означает, что расхождению
означает, что расхождению  , соответствует расхождение скорости
, соответствует расхождение скорости  .
.
Таким образом, решением задачи идентификации является вектор значений идентифицируемых параметров  , удовлетворяющий условию:
, удовлетворяющий условию:
где 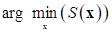 – операция получения значения
– операция получения значения  , при котором достигается минимум функции
, при котором достигается минимум функции  .
.
Для решения задачи идентификации используются метод наименьших квадратов и модифицированный метод Ньютона. Производные измеряемых в модели характеристик идентификации по идентифицируемым параметрам определяются численным методом.
Решение задачи идентификации считается успешно завершенным в следующих случаях.
1. Получено совпадение поведения модели механической системы с имеющимися результатами измерений функционирования эталонной механической системы с заданной точностью. То есть, выполнены следующие условия:
2. Приращения идентифицируемых параметров имеют значения меньше заданной точности. То есть, выполнены следующие условия:
где  – приращение значения -го идентифицируемого параметра, полученное при очередной итерации;
– приращение значения -го идентифицируемого параметра, полученное при очередной итерации;
Задача идентификации решается методом последовательных приближений. В качестве начального приближения используются значения идентифицируемых параметров, установленные в проекте перед началом исследования. Успех решения задачи и скорость сходимости в значительной степени зависят от начального приближения. Поэтому, если задача не сходится, рекомендуется повторить ее решение при других начальных значениях идентифицируемых параметров.
В качестве простого примера задачи идентификации можно привести определение начальных условий бросания камня по характеристикам траектории его движения.
− Идентифицируемые параметры:
− начальная скорость;
− угол бросания.
− Характеристики идентификации:
− высота движения камня в зависимости от времени;
− дальность движения камня в зависимости от времени.
Для решения задачи идентификации в данном случае необходимо выполнить множество замеров значений этих характеристик по траектории.
|
Для обеспечения удобства работы при решении конкретных задач идентификации могут потребоваться команды, различающиеся по способу формирования результатов замеров, используемых для идентификации. В настоящее время реализована команда “Идентификация параметров по динамике движения”.