3.3.4 Вращательный упругий элемент с функцией момента
 Элемент описывает силовое взаимодействие между двумя узлами. Схематический вид элемента представлен на рис. 4. Упругий момент прикладывается ко второму узлу элемента, и его направление противоположно направлению заданного вектора. Величина момента определяется значением заданной функции, которая зависит от приведенного угла закрутки элемента. Приведенным углом закрутки является проекция на заданный вектор вектора поворота второго узла элемента относительно первого узла. В зависимости от вида задаваемой функции элемент может иметь произвольную, в общем случае нелинейную, характеристику момента.
Элемент описывает силовое взаимодействие между двумя узлами. Схематический вид элемента представлен на рис. 4. Упругий момент прикладывается ко второму узлу элемента, и его направление противоположно направлению заданного вектора. Величина момента определяется значением заданной функции, которая зависит от приведенного угла закрутки элемента. Приведенным углом закрутки является проекция на заданный вектор вектора поворота второго узла элемента относительно первого узла. В зависимости от вида задаваемой функции элемент может иметь произвольную, в общем случае нелинейную, характеристику момента.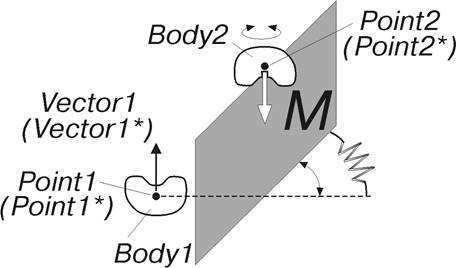
Рис. 4. Вращательный упругий элемент с функцией момента
Синтаксис метода создания
springRotaryMoment(Body1, Point1, Vector1, Body2, Point2, FunctionM,
fi01=..., damp=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Body1
point Point1
Исходный центр узла силового воздействия элемента на первое звено. Копия этой точки Point1* прикрепляется к первому звену и используется для расчета силового воздействия элемента.
vector Vector1
Исходный вектор направления момента. Копия этого вектора Vector1* прикрепляется к первому звену и используется для расчета силового воздействия элемента.
body Body2
point Point2
Исходный центр узла силового воздействия элемента на второе звено. Копия этой точки Point2* прикрепляется ко второму звену и используется для расчета силового воздействия элемента.
function FunctionM [force length]<[angle]>
Функция значения момента, действующего на второе звено. Она зависит от приведенного угла закрутки элемента.
Необязательные именованные параметры метода
 fi01 = scalar [angle]
fi01 = scalar [angle]Приведенный угол закрутки элемента в исходном положении. По умолчанию fi01 = 0 [rad].
 damp = scalar [time]
damp = scalar [time]Относительный коэффициент демпфирования элемента.
Параметры являются общими для всех методов создания силовых элементов.
Описание
При переводе проекта из режима редактирования в режим исследования для элемента выполняются следующие действия.
1. Создается узел Node1*, который прикрепляется к звену Body1. Центр узла совпадает с точкой Point1*, а ось X - с вектором Vector1*. Узел Node1* является узлом силового воздействия элемента на звено Body1. Направление оси X узла Node1* противоположно положительному направлению момента, приложенного к звену Body2.
2. Определяется значение  = fi01. Для обеспечения корректности моделирования абсолютные значения не должны превышать
= fi01. Для обеспечения корректности моделирования абсолютные значения не должны превышать 
3. Создается узел Node2*, прикрепленный к звену Body2. Центр узла совпадает с точкой Point2*, а ориентация повернута относительно ориентации узла Node1* на угол вокруг оси X. Узел Node2* является узлом силового воздействия элемента на звено Body2.
Момент, действующий со стороны элемента на узел Node2*, равен сумме упругого и демпфирующего моментов. Его значение в текущий момент времени определяется в соответствии со следующим выражением:
где  – заданная функция значения момента;
– заданная функция значения момента;
Положительное направление момента  противоположно направлению оси X узла Node1*.
противоположно направлению оси X узла Node1*.
Силовое воздействие элемента (сила, момент) на узел Node1* определяется из условия самоуравновешенности сил, действующих со стороны элемента на узлы Node1* и Node2*. Для данного элемента это означает, что на узел Node1* действуют нулевая сила и момент величиной в направлении оси X узла Node1*.
Корректность расчета силового воздействия элемента обеспечивается для значений  в пределах
в пределах  .
.