4.2.11 Тяга со сферическими наконечниками
 Шарнир представляет собой невесомую, абсолютно жесткую тягу со сферическими шарнирами на концах. Эта тяга соединяет два звена в заданных точках Point1 и Point2. В модели используются копии этих точек Point1* и Point2*, которые прикрепляются соответственно к звеньям Body1 и Body2. Шарнир имеет пять степеней свободы. Он допускает произвольный поворот одного звена относительно другого. Единственным ограничением для относительного поступательного движения соединяемых звеньев является постоянство длины тяги. Общий вид шарнира представлен на рис.84.
Шарнир представляет собой невесомую, абсолютно жесткую тягу со сферическими шарнирами на концах. Эта тяга соединяет два звена в заданных точках Point1 и Point2. В модели используются копии этих точек Point1* и Point2*, которые прикрепляются соответственно к звеньям Body1 и Body2. Шарнир имеет пять степеней свободы. Он допускает произвольный поворот одного звена относительно другого. Единственным ограничением для относительного поступательного движения соединяемых звеньев является постоянство длины тяги. Общий вид шарнира представлен на рис.84.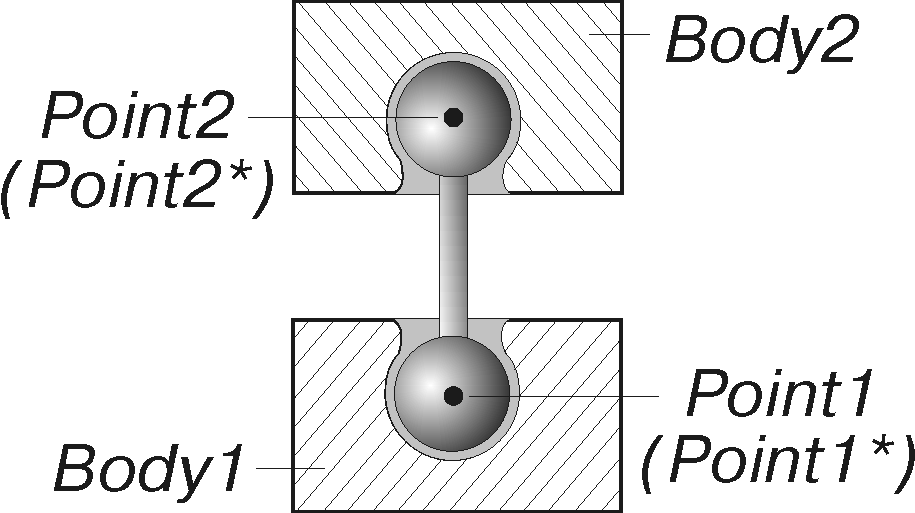
Рис. 84. Тяга со сферическими наконечниками
Синтаксис метода создания метода создания
sphericalSpherical(Body1, Point1, Body2, Point2, freeze=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Body1
Имя первого звена шарнира.
point Point1
Исходная точка, задающая центр сферического соединения тяги с первым звеном шарнира. Копия этой точки Point1* прикрепляется к первому звену.
body Body2
Имя второго звена шарнира.
point Point2
Исходная точка, задающая центр сферического соединения тяги со вторым звеном шарнира. Копия этой точки Point2* прикрепляется ко второму звену.
Необязательные именованные параметры метода
Параметры являются общими для всех методов создания шарниров и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Шарнир (joint)» главы «Основные объекты».
Описание
При переводе проекта из режима редактирования в режим исследования в шарнире производятся следующие действия.
1. Создается узел O1X1Y1Z1, который прикрепляется к звену Body1. Центр этого узла O1 совпадает с точкой Point1*, а ориентация узла совпадает с ориентацией системы координат проекта.
2. Создается узел O2X2Y2Z2, который прикрепляется к звену Body2. Центр этого узла O2 совпадает с точкой Point2*, а ориентация узла совпадает с ориентацией системы координат проекта.
В момент перевода проекта в режим исследования определяется расстояние SS между точками, заданными при создании шарнира.
В процессе движения исследуемого механизма допускается произвольное относительное положение узлов O1X1Y1Z1 и O2X2Y2Z2. Единственным ограничением при движении является постоянство расстояния между центрами узлов, которое должно быть равно SS - расстоянию между точками, заданными при создании шарнира.