4.2.12 Пользовательский шарнир
 Шарнир представляет собой кинематическую пару, в которой соединяемые звенья имеют заданные пользователем степени свободы. Число степеней свободы шарнира зависит от параметров, определенных пользователем. Это число может принимать любые значения от одного до шести. Пользовательский шарнир допускает поступательные и вращательные перемещения второго звена относительно первого звена.
Шарнир представляет собой кинематическую пару, в которой соединяемые звенья имеют заданные пользователем степени свободы. Число степеней свободы шарнира зависит от параметров, определенных пользователем. Это число может принимать любые значения от одного до шести. Пользовательский шарнир допускает поступательные и вращательные перемещения второго звена относительно первого звена.При создании шарнира задается исходный узел Node. Копии этого узла Node1* и Node2* прикрепляются соответственно к первому и второму звеньям. Степени свободы шарнира задаются как возможные перемещения узла Node2* относительно осей узла Node1*. Общий вид шарнира представлен на Рис. 85.
Синтаксис метода создания
user(Body1, Body2, Node, X, Y, Z, FiX, FiY, FiZ, freeze=..., work=..., color=..., visible=...)
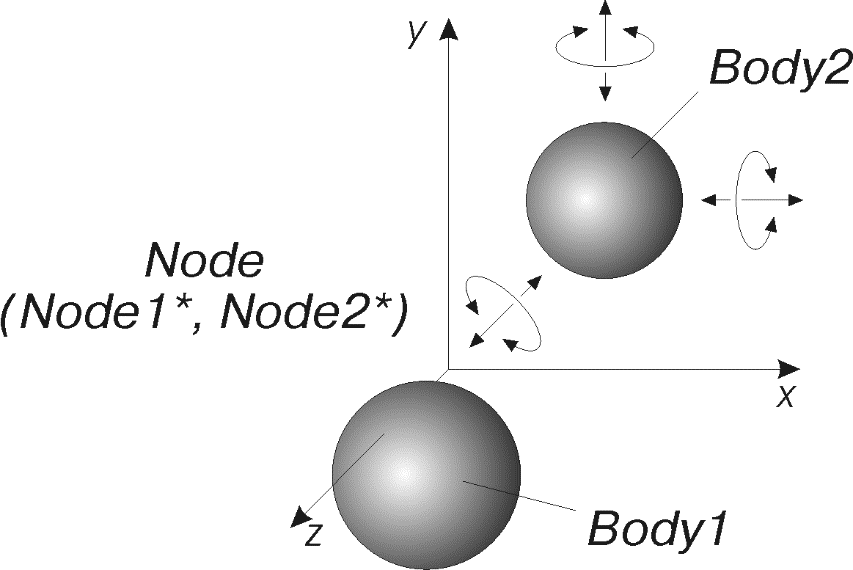
Рис. 85. Пользовательский шарнир
Обязательные позиционные параметры метода
body Body1
Имя первого звена шарнира.
body Body2
Имя второго звена шарнира.
node Node
Исходный узел шарнира. Копии этого узла Node1* и Node2* прикрепляются соответственно к первому и второму звеньям. Степени свободы шарнира задаются как возможные перемещения узла Node2* относительно осей узла Node1*.
X = [yesX:/noX:]
Параметр, который определяет поступательную подвижность шарнира по оси X.
 yesX:
yesX:Шарнир имеет поступательную подвижность по оси X.
 noX:
noX:Шарнир не имеет поступательной подвижности по оси X.
Y = [yesY:/noY:]
Параметр, который определяет поступательную подвижность шарнира по оси Y.
 yesY:
yesY:Шарнир имеет поступательную подвижность по оси Y.
 noY:
noY:Шарнир не имеет поступательной подвижности по оси Y.
Z = [yesZ:/noZ:]
Параметр, который определяет поступательную подвижность шарнира по оси Z.
 yesZ:
yesZ:Шарнир имеет поступательную подвижность по оси Z.
 noZ:
noZ:Шарнир не имеет поступательной подвижности по оси Z.
FiX = [yesFiX:/noFiX:]
Параметр, который определяет вращательную подвижность шарнира вокруг оси X.
 yesFiX:
yesFiX:Шарнир имеет вращательную подвижность вокруг оси X.
 noFiX:
noFiX:Шарнир не имеет вращательной подвижности вокруг оси X.
FiY = [yesFiY:/noFiY:]
Параметр, который определяет вращательную подвижность шарнира вокруг оси Y.
 yesFiY:
yesFiY:Шарнир имеет вращательную подвижность вокруг оси Y.
 noFiY:
noFiY:Шарнир не имеет вращательной подвижности вокруг оси Y.
FiZ = [yesFiZ:/noFiZ:]
Параметр, который определяет вращательную подвижность шарнира вокруг оси Z.
 yesFiZ:
yesFiZ:Шарнир имеет вращательную подвижность вокруг оси Z.
 noFiZ:
noFiZ:Шарнир не имеет вращательной подвижности вокруг оси Z.
Необязательные именованные параметры метода
Параметры являются общими для всех методов создания шарниров и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Шарнир (joint)» главы «Основные объекты».
Описание
При переводе проекта из режима редактирования в режим исследования в шарнире производятся следующие действия.
1. Создается узел Node1*, который прикрепляется к звену Body1. При создании этот узел совпадает узлом Node.
2. Создается узел Node2*, который прикрепляется к звену Body2. При создании этот узел совпадает узлом Node.
Таким образом, в момент создания узлы Node1* и Node2* совпадают.
С помощью данного метода можно создавать широкий диапазон шарниров, задавая различные значения параметров X, Y, Z, FiX, FiY и FiZ.
Пример
...
joint joint1 = user(b1, b2, n1, noX, noY, noZ, yesFiX, noFiY, noFiZ);
//joint1 - пара вращения
joint joint2 = user(b3, b4, n2, noX, noY, noZ, noFiX, yesFiY, noFiZ);
//joint2 - пара вращения
joint joint3 = user(b5, b6, n3, noX, noY, noZ, noFiX, noFiY, yesFiZ);
//joint3 - пара вращения
joint joint 4= user(b7, b8, n4, yesX, yesY, noZ, noFiX, noFiY, yesFiZ);
//joint4 - контакт плоскость - плоскость
joint joint5 = user(b9, b10, n5, yesX, yesY, noZ, yesFiX, yesFiY, yesFiZ);
//joint5 - контакт точка - плоскость
joint joint6 = user(b11, b12, n6, yesX, noY, noZ, yesFiX, yesFiY, yesFiZ);
//joint6 - контакт точка - прямая
Внутренние системные объекты
Системные датчики создаются в шарнире только для реальных степеней свободы, которые определены пользователем при задании шарнира.
sensor x [length], sensor y [length], sensor z [length],
Координаты центра узла второго звена шарнира в системе координат узла первого звена.
sensor fiX [angle], sensor fiY [angle], sensor fiZ [angle]
Приведенные параметры Эйлера, определяющие поворот узла второго звена шарнира относительно узла первого звена.