4.3.15 Двухузловой упругий элемент
 Элемент описывает силовое взаимодействие между двумя узлами. Схематический вид элемента представлен на Рис. 104. Упругие характеристики силового взаимодействия определяются матрицей жесткости размером 6x6.
Элемент описывает силовое взаимодействие между двумя узлами. Схематический вид элемента представлен на Рис. 104. Упругие характеристики силового взаимодействия определяются матрицей жесткости размером 6x6.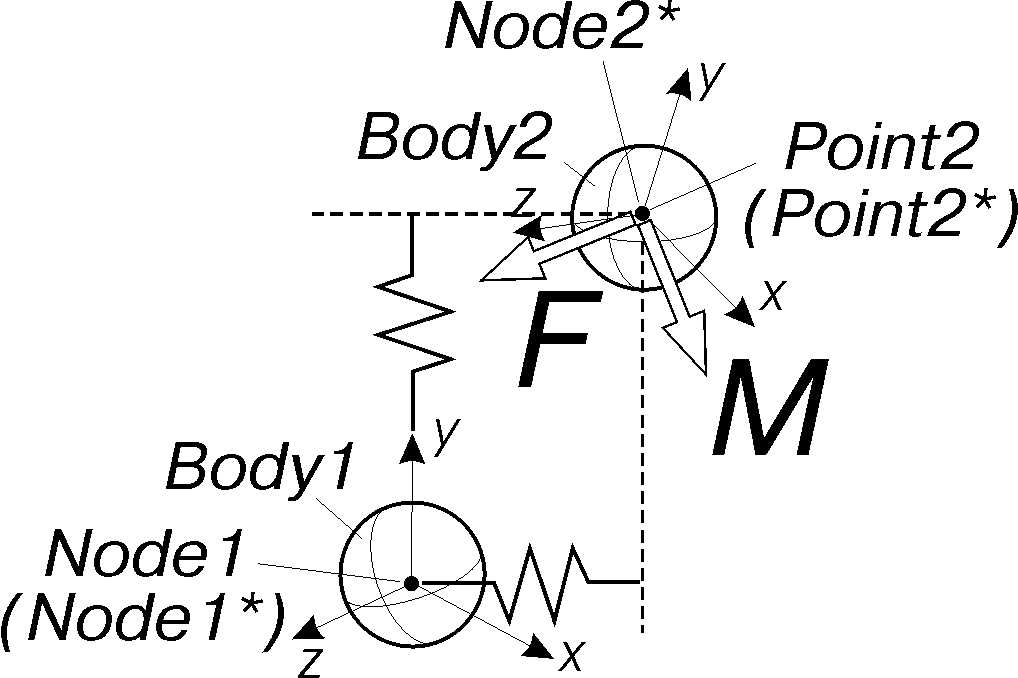
Рис. 104. Двухузловой упругий элемент
Синтаксис метода создания
general(Body1, Node1, Body2, Point2, MatrK, Fx0=..., Fy0=..., Fz0=..., Mx0=..., My0=..., Mz0=..., damp=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Body1
Имя первого звена, на которое действует силовой элемент.
node Node1
Исходный узел силового воздействия элемента на первое звено. Копия этого узла Node* прикрепляется к первому звену и используется для расчета силового воздействия элемента.
body Body2
Имя второго звена, на которое действует силовой элемент.
point Point2
Исходная точка силового воздействия элемента на второе звено. Копия этой точки Point2* прикрепляется ко второму звену и используется для расчета силового воздействия элемента.
stifness6x6 MatrK
Матрица жесткости силового элемента.
Необязательные именованные параметры метода
 Fx0 = scalar [force]
Fx0 = scalar [force]Значение упругой силы в исходном положении механизма, действующей со стороны элемента на звено Body2 в направлении, противоположном оси X узла Node1. При этом на звено Body1 действует такая же сила в направлении, совпадающем с направлением оси X. По умолчанию Fx0=0 [N].
 Fy0 = scalar [force]
Fy0 = scalar [force]Значение упругой силы в исходном положении механизма, действующей со стороны элемента на звено Body2 в направлении, противоположном оси Y узла Node1. При этом на звено Body1 действует такая же сила в направлении, совпадающем с направлением оси Y. По умолчанию Fy0=0 [N].
 Fz0 = scalar [force]
Fz0 = scalar [force]Значение упругой силы в исходном положении механизма, действующей со стороны элемента на звено Body2 в направлении, противоположном оси Z узла Node1. При этом на звено Body1 действует такая же сила в направлении, совпадающем с направлением оси Z. По умолчанию Fz0=0 [N].
 Mx0 = scalar [force length]
Mx0 = scalar [force length]Значение упругого момента в исходном положении механизма, действующего со стороны элемента на звено Body2 в направлении, противоположном оси X узла Node1. По умолчанию Mx0=0 [N m].
 My0 = scalar [force length]
My0 = scalar [force length]Значение упругого момента в исходном положении механизма, действующего со стороны элемента на звено Body2 в направлении, противоположном оси Y узла Node1. По умолчанию My0=0 [N m].
 Mz0 = scalar [force length]
Mz0 = scalar [force length]Значение упругого момента в исходном положении механизма, действующего со стороны элемента на звено Body2 в направлении, противоположном оси Z узла Node1. По умолчанию Mz0=0 [N m].
 damp = scalar [time]
damp = scalar [time]Относительный коэффициент демпфирования элемента.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты».
Описание
При переводе проекта из режима редактирования в режим исследования для элемента выполняются следующие действия.
1. Создается узел Node1*, который прикрепляется к звену Body1. Центр и ориентация этого узла совпадает с узлом Node1. Узел Node1* является узлом силового воздействия элемента на звено Body1.
2. По матрице жесткости MatrK и вектору начального силового воздействия (Fx0, Fy0, Fz0, Mx0, My0, Mz0) определяются линейные ( ,
,  ,
,  ) и угловые (
) и угловые ( ,
,  ,
,  ) координаты, которые точка Point2 имеет в недеформированном состоянии элемента. Под угловыми координатами понимаются приведенные параметры Эйлера. В недеформированном состоянии элемент не оказывает силового воздействия на узлы. Для обеспечения корректности моделирования угловые координаты (, , ) должны удовлетворять следующему ограничению:
) координаты, которые точка Point2 имеет в недеформированном состоянии элемента. Под угловыми координатами понимаются приведенные параметры Эйлера. В недеформированном состоянии элемент не оказывает силового воздействия на узлы. Для обеспечения корректности моделирования угловые координаты (, , ) должны удовлетворять следующему ограничению:
3. Создается узел Node2*, который прикрепляется к звену Body2. Центр совпадает с точкой Point2, а ориентация отличается от ориентации узла Node1* поворотом на угловые координаты(, , ). Узел Node2* является узлом силового воздействия элемента на звено Body2.
Силовое воздействие со стороны элемента на узел Node2* равно сумме упругого и демпфирующего воздействий. Его значение в текущий момент времени определяется в соответствии со следующим выражением:
где  - шестикомпонентный вектор проекции силы и момента (
- шестикомпонентный вектор проекции силы и момента ( ,
,  ,
,  ,
,  ,
,  ,
,  ), действующих на узел Node2*, в системе координат узла Node1*;
), действующих на узел Node2*, в системе координат узла Node1*;  - заданная матрица жесткости элемента;
- заданная матрица жесткости элемента;  - трехкомпонентный вектор (
- трехкомпонентный вектор ( ,
,  ,
,  ) линейных координат узла Node2* относительно узла Node1* в текущий момент времени;
) линейных координат узла Node2* относительно узла Node1* в текущий момент времени;  - трехкомпонентный вектор (, , ) линейных координат узла Node2* относительно узла Node1* для недеформированного состояния элемента;
- трехкомпонентный вектор (, , ) линейных координат узла Node2* относительно узла Node1* для недеформированного состояния элемента;  - трехкомпонентный вектор (
- трехкомпонентный вектор ( ,
,  ,
,  ) угловых (приведенные параметры Эйлера) координат узла Node2* относительно узла Node1* в текущий момент времени;
) угловых (приведенные параметры Эйлера) координат узла Node2* относительно узла Node1* в текущий момент времени;  - относительный коэффициент демпфирования элемента;
- относительный коэффициент демпфирования элемента;  - скорость изменения
- скорость изменения  - координат узла Node2* относительно узла Node1*.
- координат узла Node2* относительно узла Node1*.
Силовое воздействие элемента (сила, момент) на узел Node1* определяется из условия равновесия сил и моментов, действующих на узлы Node1* и Node2* со стороны элемента.
Корректность расчета силового воздействия элемента обеспечивается при относительном повороте в процессе движения узлов Node1* и Node2* в пределах: