6.1 Стабилизация груза
Данный пример демонстрирует решение задачи стабилизации положения груза с учетом внешнего управляющего сигнала. Описание задачи приведено в подразделе Стабилизация груза главы Примеры использования модели SimInTech в EULER.
В подразделе Стабилизация груза главы Примеры использования модели SimInTech в EULER было показано, что программный комплекс EULER при расчете может использовать DLL-библиотеку, подготовленную в программной среде SimInTech, которая в продемонстрированном примере формировала управляющий сигнал. Перемещение груза под действием силы, определяемой управляющим сигналом, рассчитывалось программным комплексом EULER, выступающим как «инициатор» расчета.
В данном разделе показано решение этой же задачи, но в качестве «инициатора» расчета выступает программный комплекс SimInTech, где производится расчет управляющего сигнала (силы, действующей на груз) на основе данных о положении, скорости и ускорении груза, получаемых из расчета движения груза в модели программной системы EULER, вызываемой из SimInTech.
В программной системе SimInTech создадим новую расчетную модель (пункт меню Файл, Новый проект, Схема общая) и в качестве первого блока разместим с закладки Внешние модели блок Интеграция с EULER.
Если левой клавишей мыши сделать двойной клик по блоку Интеграция с EULER на схеме модели, то откроется окно программного комплекса EULER (рис.55), в котором, с учетом блокировки части команд меню, можно подготовить расчетную модель части рассматриваемой системы так, как она бы создавалась в новом проекте в программном комплексе EULER. При этом можно, например, копировать описание модели в виде команд программного комплекса EULER.
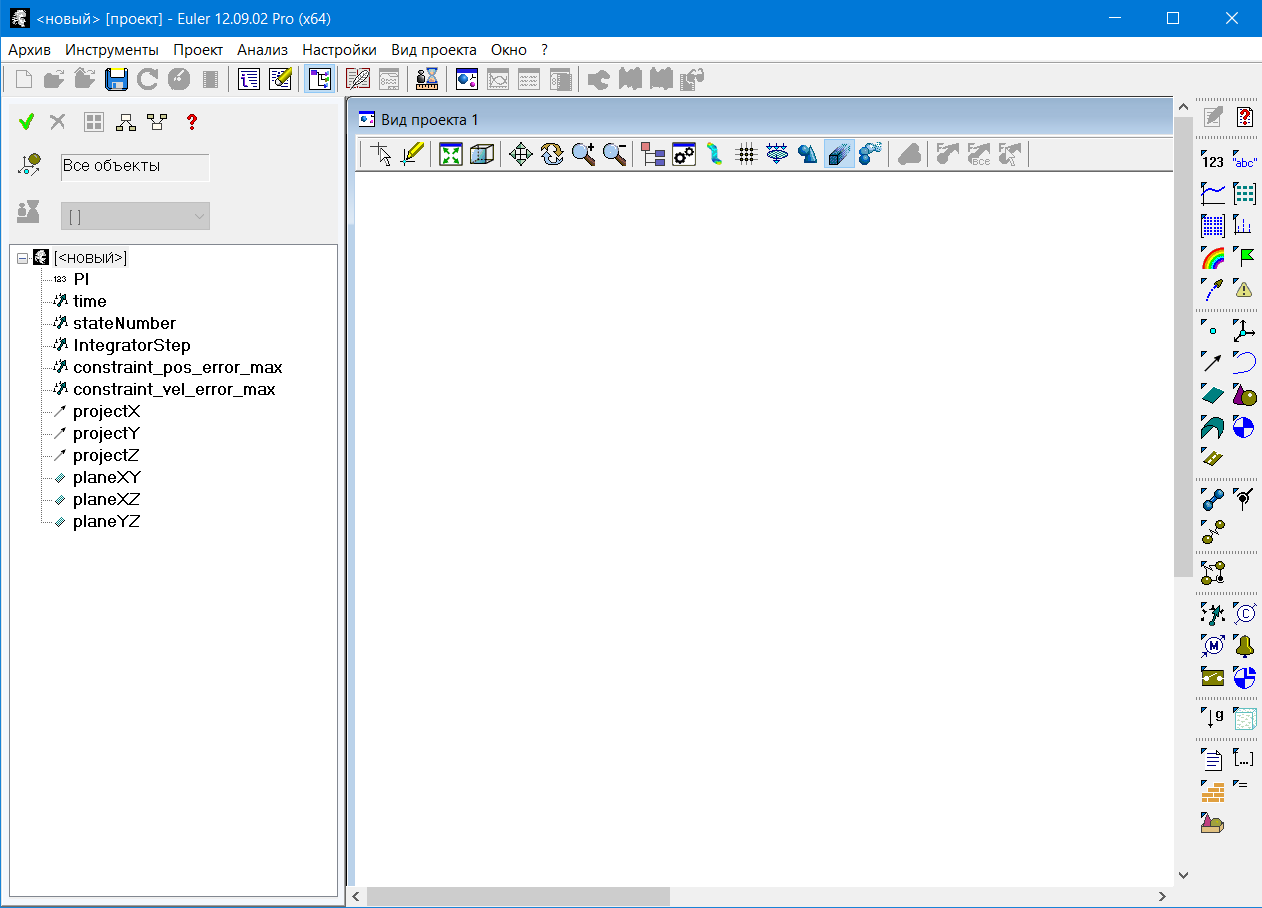
Рис. 47. Первоначальное состояние окна программной системы EULER после его вызова из SimInTech
Другой вариант подразумевает наличие сохраненной в elr-файле EULER модели. При этом по клику правой кнопкой мыши по блоку Интеграция с EULER на схеме модели из контекстного меню объекта можно выбрать пункт Свойства объекта и в окне Свойства: EulerBlock1 для свойства Имя файла проекта установить значение, указывающее на путь к elr-файлу с готовой расчетной моделью (рис.56).
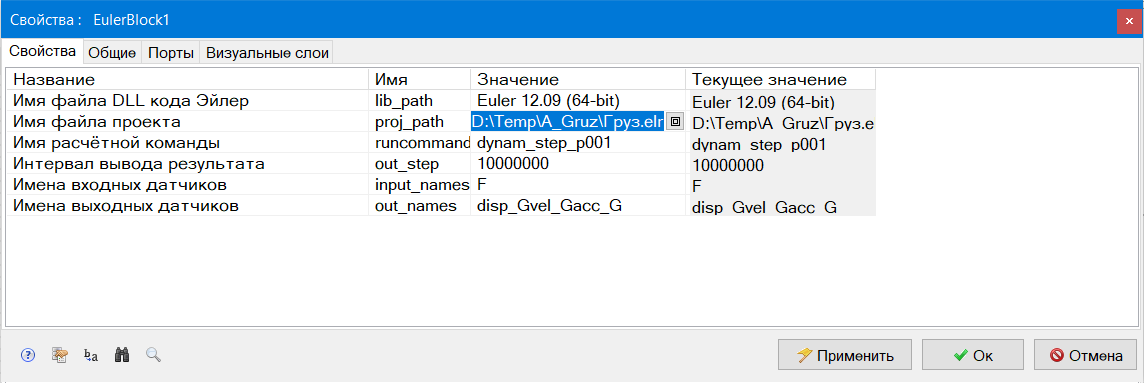
Рис. 48. Изменение свойств блока Интеграция с EULER
Далее необходимо установить свойства датчиков Входной параметр DLL (рис.57) и Выходной параметр DLL (рис.58), определив таким образом, какие данные будут использоваться как входные и выходные параметры при вызове на расчет программным комплексом SimInTech EULER модели. На изображении блока Интеграция с EULER на схеме модели в SimInTech появятся соответствующие входные и выходные порты (рис.59). Здесь же устанавливаем значение параметра Имя расчетной команды (рис.60) и, при необходимости, значение параметра Интервал вывода результата.
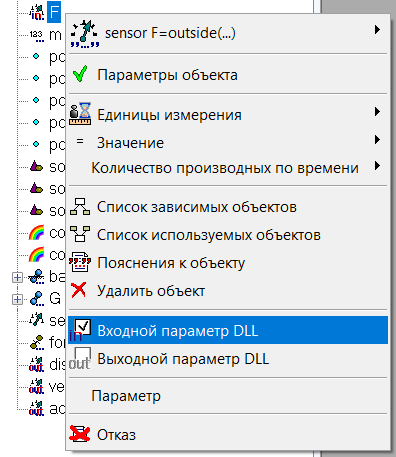
Рис. 49. Установка свойства датчика Входной параметр DLL
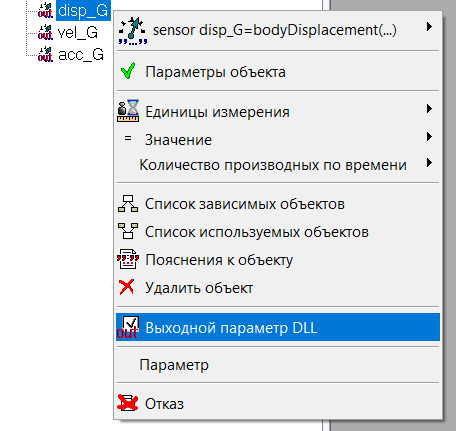
Рис. 50. Установка свойства датчика Выходной параметр DLL
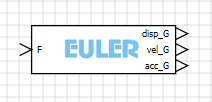
Рис. 51. Первый блок расчетной модели - Интеграция с EULER
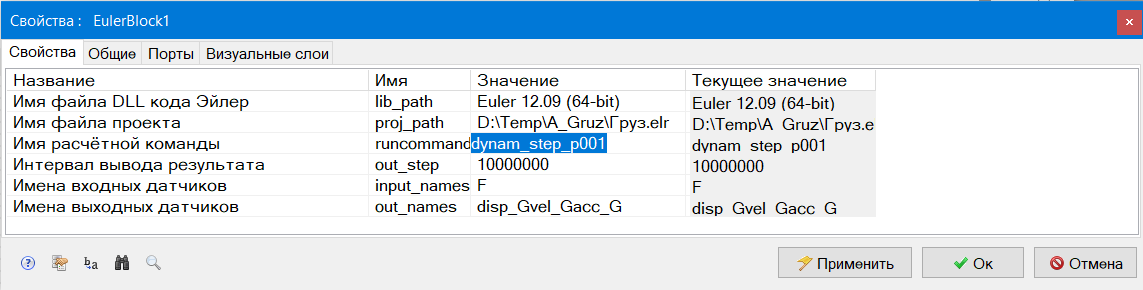
Рис. 52. Настройка параметра Имя расчетной команды
На схему модели в SimInTech добавляем блоки констант (рис.61), операторов сравнения (вычитания), перемножения и суммирования (рис.62). Соединяем соответствующие входы и выходы блоков в соответствии с заданным алгоритмом расчета управляющей силы и получаем расчетную модель SimInTech (рис.63). Добавляем на схему блоки Временной график, позволяющие наблюдать на обновляемых во время расчета графиках изменение соответствующих расчетных величин (рис.64).
Запускаем расчет из программного комплекса SimInTech и сравниваем получаемые результаты с результатами расчета программным комплексом EULER с использованием подготовленной SimInTech DLL-библиотеки, приведенными в подразделе Стабилизация груза главы Примеры использования модели SimInTech в EULER
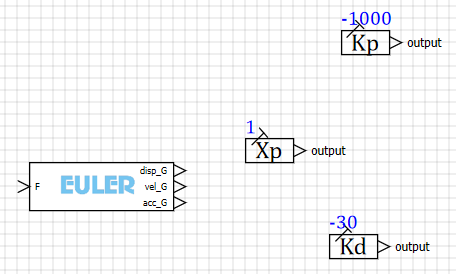
Рис. 53. Добавление в модель SimInTech констант
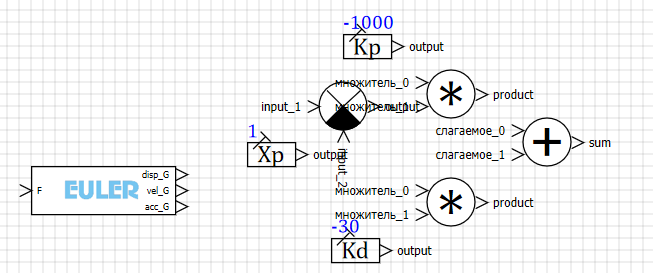
Рис. 54. Добавление в модель SimInTech констант
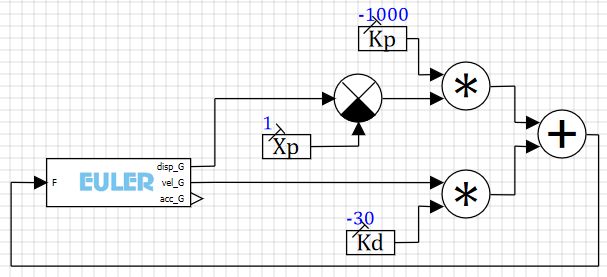
Рис. 55. Модель SimInTech для расчета стабилизации груза, использующая модель EULER
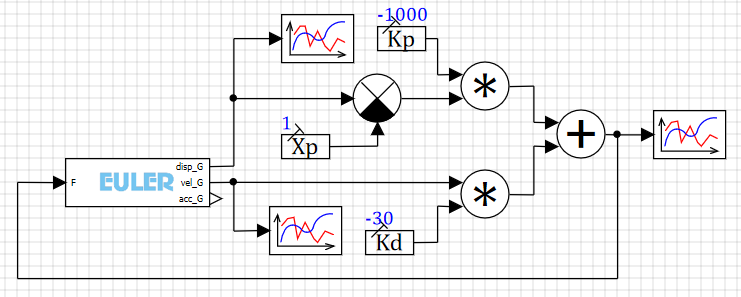
Рис. 56. Модель SimInTech для расчета стабилизации груза, использующая модель EULER