3.2.16 Дифференциал
 Шарнир соединяет четыре звена: корпус, входной вал, первый выходной вал и второй выходной вал. Он имеет две степени свободы. Общий вид шарнира представлен на рис. 16. Шарнир моделирует механический дифференциал с произвольным расположением оси вращения входного вала и общей осью вращения первого и второго выходных валов. Эти оси зафиксированы относительно корпуса дифференциала. Шарнир допускает вращение входного вала относительно корпуса, и это вращение передается выходным валам. Допускается также вращение выходных валов относительно друг друга. При этом конструкция шарнира обеспечивает передачу равных моментов вращения на оба выходных вала по оси их вращения. В составе дифференциала имеется редуктор, который изменяет среднюю угловую скорость вращения выходных валов относительно угловой скорости вращения входного вала.
Шарнир соединяет четыре звена: корпус, входной вал, первый выходной вал и второй выходной вал. Он имеет две степени свободы. Общий вид шарнира представлен на рис. 16. Шарнир моделирует механический дифференциал с произвольным расположением оси вращения входного вала и общей осью вращения первого и второго выходных валов. Эти оси зафиксированы относительно корпуса дифференциала. Шарнир допускает вращение входного вала относительно корпуса, и это вращение передается выходным валам. Допускается также вращение выходных валов относительно друг друга. При этом конструкция шарнира обеспечивает передачу равных моментов вращения на оба выходных вала по оси их вращения. В составе дифференциала имеется редуктор, который изменяет среднюю угловую скорость вращения выходных валов относительно угловой скорости вращения входного вала.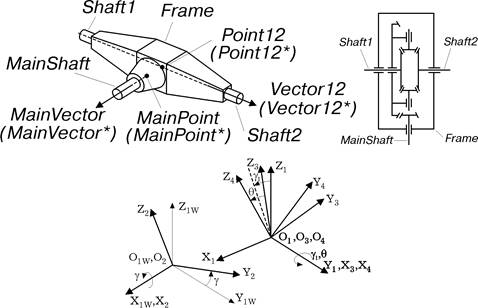
Рис. 16. Дифференциал
При создании шарнира задаются: точка оси вращения входного вала MainPoint, точка оси вращения выходных валов Point12, вектор направления вращения входного вала MainVector и вектор направления вращения выходных валов Vector12. В модели используются копии этих объектов MainPoint*, Point12*, MainVector* и Vector12*, которые прикрепляются к звену Frame.
Синтаксис метода создания
differential(Frame, MainShaft, Shaft1, Shaft2, MainPoint, MainVector, Point12,
Vector12, K, freeze=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Frame
body MainShaft
body Shaft1
body Shaft2
point MainPoint
Исходная точка, задающая точку оси входного вала дифференциала. Копия этой точки MainPoint* прикрепляется к звену Frame. Точка MainPoint* задает точку оси вращения входного вала в процессе движения исследуемого механизма.
vector MainVector
Исходный вектор, задающий направление оси входного вала дифференциала. Копия этого вектора MainVector* прикрепляется к звену Frame. Вектор MainVector* задает направление оси вращения входного вала в процессе движения исследуемого механизма.
point Point12
Исходная точка, задающая точку оси выходных валов дифференциала. Копия этой точки Point12* прикрепляется к звену Frame. Точка Point12* задает точку оси вращения выходных валов в процессе движения исследуемого механизма.
vector Vector12
Исходный вектор, задающий направление оси выходных валов дифференциала. Копия этого вектора Vector12* прикрепляется к звену Frame. Вектор Vector12* задает направление оси вращения выходных валов в процессе движения исследуемого механизма.
 scalar K [-]
scalar K [-]Передаточное отношение редуктора дифференциала.
где  – угол поворота входного вала относительно корпуса;
– угол поворота входного вала относительно корпуса;
Необязательные именованные параметры метода
Параметры являются общими для всех методов создания шарниров.
Описание
При переводе проекта из режима редактирования в режим исследования в шарнире производятся следующие действия.
1. Создается узел O1X1Y1Z1 (см. рис. 16), который прикрепляется к звену Frame. Центр этого узла O1 совпадает с точкой Point12*. Ось Y1 совпадает с вектором Vector12*.
2. Создается узел O3X3Y3Z3 (см. рис. 16), который прикрепляется к звену Shaft1. Центр этого узла O3 совпадает с точкой Point12*. Ось X3 совпадает с вектором Vector12*.
3. Создается узел O4X4Y4Z4 (см. рис. 16), который прикрепляется к звену Shaft2. В момент создания узел O4X4Y4Z4 совпадает с узлом O3X3Y3Z3.
4. Создается вспомогательный узел O1WX1WY1WZ1W (см. рис. 16), который прикрепляется к звену Frame. Центр этого узла O1W совпадает с точкой MainPoint*.
5. Создается узел O2X2Y2Z2 (см. рис. 16), который прикрепляется к звену MainShaft. В момент создания узел O2X2Y2Z2 совпадает с узлом O1WX1WY1WZ1W.
В процессе движения исследуемого механизма совпадают центры узлов O1, O3, O4, оси Y1, X3, X4, а также центры узлов O2, O1W и оси X2, X1W.
Внутренние системные объекты
sensor gamma [angle]
Угол поворота  входного вала относительно корпуса (см. рис. 16).
входного вала относительно корпуса (см. рис. 16).
sensor teta [angle]
Угол поворота  второго выходного вала относительно первого выходного вала (см. рис. 16).
второго выходного вала относительно первого выходного вала (см. рис. 16).