4.1.10 Проекция угловой скорости звена относительно другого звена на вектор
 Значением датчика является проекция угловой скорости звена Body2 относительно звена Body1. Проекция осуществляется на вектор, зависящий от заданного значения необязательного именованного параметра fixingVector = … . Если параметр fixingVector = lockVector: или его значение не задано, то значением датчика является проекция угловой скорости на вектор Vector1*. Если параметр fixingVector = unlockVector:, то значением датчика является проекция угловой скорости на вектор Vector1.
Значением датчика является проекция угловой скорости звена Body2 относительно звена Body1. Проекция осуществляется на вектор, зависящий от заданного значения необязательного именованного параметра fixingVector = … . Если параметр fixingVector = lockVector: или его значение не задано, то значением датчика является проекция угловой скорости на вектор Vector1*. Если параметр fixingVector = unlockVector:, то значением датчика является проекция угловой скорости на вектор Vector1.Вектор Vector1* является копией заданного вектора Vector1 и совпадает с ним в момент создания. Вектор Vector1* создается только при переводе проекта из режима редактирования в режим исследования, если у датчика необязательный именованный параметр fixingVector = lockVector: или его значение не задано. Созданный вектор Vector1* прикрепляется к звену Body1.
Если заданный Vector1 не прикреплен к звену, то на виде проекта он не перемещается вместе с механизмом в процессе его движения. Исключением является ситуация, когда вектор Vector1 создан методом «вектор по двум точкам» и точки при этом прикреплены к звеньям. В этом случае вектор Vector1 будет перемещаться на виде проекта, даже если он не прикреплен к звену. Копия вектора Vector1* является внутренним системным объектом и не отображается на виде проекта.
Размерность значения датчика - [angle / time].
Датчик является дифференцируемым по параметрам положения механизма, если необязательный именованный параметр fixingVector=lockVector.
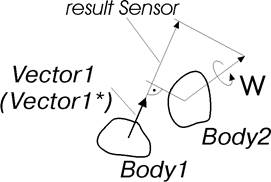
Рис. 9. Проекция угловой скорости звена относительно другого звена на вектор
Синтаксис метода создания
rotVelocity(Body1, Vector1, Body2, fixingVector=...)
Обязательные позиционные параметры метода
body Body1
vector Vector1
Исходный вектор для проецирования угловой скорости. При необходимости создается копия этого вектора Vector1* и прикрепляется к первому звену.
body Body2
Необязательные именованные параметры метода
fixingVector = [lockVector:/unlockVector:]
Параметр определяет, какой из векторов используется для проекции. Им может быть исходный вектор или вектор, который создается по исходному вектору и прикрепляется к звену, определяемому по необязательному именованному параметру bodyFixVector. Положение исходного вектора относительно первого и второго звена может изменяться в процессе движения механизма.
По умолчанию fixingVector = lockVector:.
 fixingVector = lockVector:
fixingVector = lockVector:Для проекции используется вектор, который создается по исходному вектору и прикрепляется к звену, определяемому по необязательному именованному параметру bodyFixVector, при переводе проекта в режим исследования.
 fixingVector = unlockVector:
fixingVector = unlockVector:Для проекции используется исходный вектор, положение которого относительно первого и второго звена может изменяться в процессе движения механизма.
Описание
При переводе проекта из режима редактирования в режим исследования, если именованный параметр fixingVector = lockVector: или его значение не задано, создается вектор Vector1*. Он прикреплен к звену Body1 и в момент создания совпадает с вектором Vector1.
Если именованный параметр fixingVector = lockVector: или его значение не задано, то значением датчика является проекция на вектор Vector1* угловой скорости звена Body2 относительно звена Body1.
Если именованный параметр fixingVector = unlockVector:, то значением датчика является проекция на вектор Vector1 угловой скорости звена Body2 относительно звена Body1.