4.1.13 Угол между плоскостью и вектором
 Значением датчика является угол между вектором и плоскостью. Если необязательный именованный параметр axisDirection типа вектор не задан пользователем, то датчик выдает значение угла в интервале [-p/2, p/2]. Если параметр axisDirection задан пользователем, то датчик определяет угол поворота вектора Vector относительно плоскости Plane вокруг оси, перпендикулярной вектору Vector. Эта ось лежит в плоскости Plane и направлена в сторону вектора axisDirection. При этом датчик выдает значение угла в интервале [-p, p]. Для корректности расчета недопустим случай, когда угол между вектором axisDirection и плоскостью, образованной нормалью плоскости и вектором Vector, меньше десяти градусов.
Значением датчика является угол между вектором и плоскостью. Если необязательный именованный параметр axisDirection типа вектор не задан пользователем, то датчик выдает значение угла в интервале [-p/2, p/2]. Если параметр axisDirection задан пользователем, то датчик определяет угол поворота вектора Vector относительно плоскости Plane вокруг оси, перпендикулярной вектору Vector. Эта ось лежит в плоскости Plane и направлена в сторону вектора axisDirection. При этом датчик выдает значение угла в интервале [-p, p]. Для корректности расчета недопустим случай, когда угол между вектором axisDirection и плоскостью, образованной нормалью плоскости и вектором Vector, меньше десяти градусов.Положительное значение угла выдается в том случае, когда вектор ориентирован по отношению к плоскости в ту же сторону, что и ее нормаль.
Размерность значения датчика - [angle].
Датчик является дифференцируемым по параметрам положения механизма при выполнении следующих условий:
− вектор Vector и плоскость Plane прикреплены к звеньям, либо не зависят от параметров положения механизма, т.е. во время движения механизма не меняют своего положения.
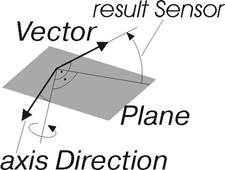
Рис. 12. Угол между плоскостью и вектором
Синтаксис метода создания
angleVP(Vector, Plane, axisDirection =...)
Обязательные позиционные параметры метода
vector Vector
plane Plane
Плоскость.
Необязательные именованные параметры метода
 axisDirection = vector
axisDirection = vectorНаправление оси измерения угла поворота.