4.1 Шина
 Данный элемент описывает силовое взаимодействие между колесом с эластичной шиной и твердой опорной поверхностью произвольного вида.
Данный элемент описывает силовое взаимодействие между колесом с эластичной шиной и твердой опорной поверхностью произвольного вида.Силовое взаимодействие осуществляется между дорогой и звеном обода колеса. Общий вид силового элемента представлен на рис.2.
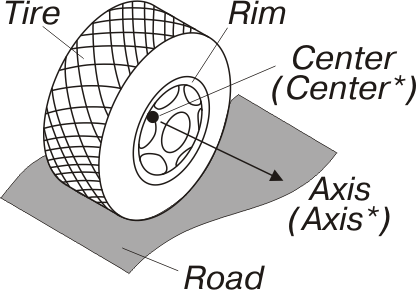
Рис. 2. Шина
Синтаксис метода создания
tire2(Road, Rim, Center, Axis, TireParams, tireRing=…, valueAveragingSys=…, work=..., color=..., visible=...)
Обязательные позиционные параметры метода
road Road
Имя дороги, по которой осуществляется качение колеса. Дорога должна быть создана одним из методов, задающих твердую опорную поверхность.
body Rim
Имя звена – обода колеса.
point Center
Исходная точка, задающая центр колеса. Копия этой точки Center* прикрепляется к звену Rim. Точка Center* задает центр вращения колеса в процессе движения исследуемого механизма.
vector Axis
Исходный вектор, задающий направление нормали теоретической центральной плоскости вращения колеса. Копия этого вектора Axis* прикрепляется к звену Rim. Вектор Axis* задает направление нормали плоскости вращения колеса в процессе движения исследуемого механизма.
template TireParams
Шаблон параметров модели взаимодействия эластичной шины с твердой опорной поверхностью.
Необязательные именованные параметры метода
 tireRing = body
tireRing = bodyИмя звена – кольцо брекера. По умолчанию звено кольца брекера не задается, что соответствует моделям колеса «шина-EULER-M1» и «шина-EULER-M2» (tireModel = [M1:/M2:]). Если пользователь явно задает значение параметра tireRing, а в шаблоне параметры шины задано значение tireModel = [M1:/M2:], то при создании модели звенья Rim и tireRing будут жестко соединены между собой.
Для реализации модели колеса «шина-EULER-M3» пользователь должен явно задать значение параметра tireRing, а в шаблоне параметры шины задать tireModel = M3:. Если звено кольца брекера не задано (или оно скреплено со звеном обода колеса Rim неразрушаемым жестким соединением), а в шаблоне параметры шины задано tireModel = M3:, то диагностируется ошибка.
 valueAveragingSys = scalar [-]
valueAveragingSys = scalar [-]Количество шагов интегрирования, используемых для усреднения значения системных датчиков объекта. Значение 0 соответствует отсутствию усреднения. По умолчанию valueAveragingSys = 3.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты» в книге «Описание объектов многокомпонентной механической системы».
Описание
В данном силовом элементе для определения характеристик пятна контакта и кинематических параметров движения колеса используется модель взаимодействия “колесо-дорога”, которая схематично представлена на рис.3. В каждый момент времени в процессе численного интегрирования параметров движения определяется зона контакта шины с поверхностью качения. Эта зона, в общем случае, может быть неодносвязной и располагаться в пространстве произвольным образом. Затем, на основании анализа зоны контакта, определяется эквивалентная плоскость контакта, которая с наилучшим приближением создает такие же реакции, какие действуют на колесо на исходной поверхности контакта.
Эквивалентная плоскость контакта мгновенно замораживается относительно дороги. Она используется для определения кинематических параметров движения колеса. К таковым относятся угол наклона, угол увода, кривизна следа качения, и т.д.
В модели рассчитываются шесть составляющих силового воздействия деформируемой опорной поверхности на колесо с эластичной шиной:
− нормальная сила;
− боковая сила;
− продольная сила;
− стабилизирующий момент;
− восстанавливающий момент;
− момент сопротивления качению.
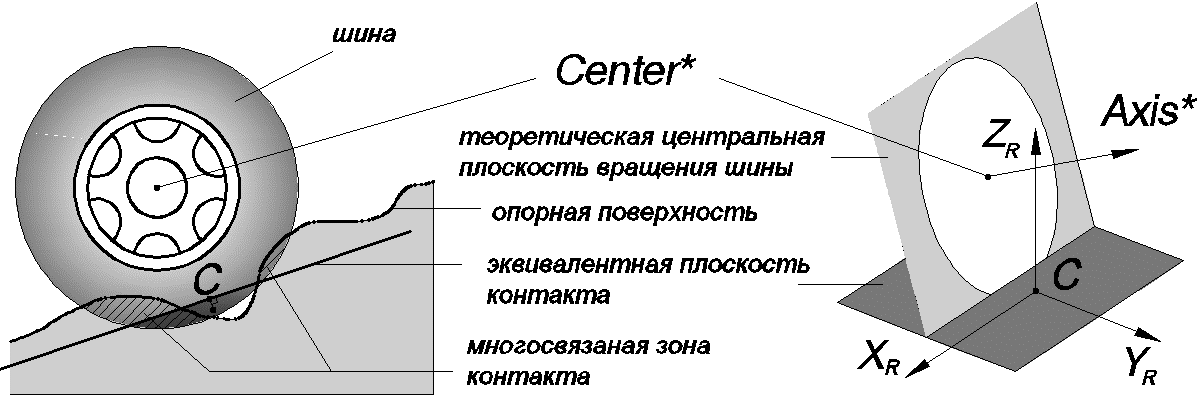
Рис. 3. Модель взаимодействия «колесо-дорога»
Силовые факторы и кинематические параметры колеса выводятся в системе координат узла пятна контакта  (рис.3). Этот узел определяется в каждый момент времени следующим образом:
(рис.3). Этот узел определяется в каждый момент времени следующим образом:
1. Точка  , задающая центр узла, является геометрическим центром пятна контакта;
, задающая центр узла, является геометрическим центром пятна контакта;
2. Ось  перпендикулярна эквивалентной плоскости контакта и направлена от точки в сторону центра колеса;
перпендикулярна эквивалентной плоскости контакта и направлена от точки в сторону центра колеса;
3. Ось  совпадает с проекцией вектора нормали теоретической центральной плоскости вращения колеса на эквивалентную плоскость контакта;
совпадает с проекцией вектора нормали теоретической центральной плоскости вращения колеса на эквивалентную плоскость контакта;
4. Ось  дополняет узел до правой системы координат и лежит в эквивалентной плоскости контакта.
дополняет узел до правой системы координат и лежит в эквивалентной плоскости контакта.
Коэффициент продольного проскальзывания колеса вычисляется по формуле:
где  – радиус качения колеса без проскальзывания;
– радиус качения колеса без проскальзывания;  ,
,  – проекции линейной и угловой скорости обода колеса на оси
– проекции линейной и угловой скорости обода колеса на оси  и Axis* соответственно.
и Axis* соответственно.
Внутренние системные объекты
sensor delta [deg]
Угол увода колеса.
sensor gamma [deg]
Угол наклона колеса.
sensor Sx [ ]
Коэффициент продольного проскальзывания колеса.
sensor Rx [N]
Продольная реакция опорной поверхности.
sensor Ry [N]
Боковая реакция опорной поверхности.
sensor Rz [N]
Нормальная реакция опорной поверхности.
sensor Mx [Nm]
Восстанавливающий момент.
sensor My [Nm]
Момент сопротивления качению.
sensor Mz [Nm]
Стабилизирующий момент.
sensor hz [m]
Нормальная деформация шины эквивалентной плоскостью контакта. При отсутствии контакта шины с опорной поверхностью значение датчика равно 0 [m].
sensor RASlide [-]
Относительная площадь проскальзывания в пятне контакта.