4.3.19 Стабилизатор
 Элемент представляет собой плоскую раму с четырьмя точками крепления. Рама имеет круглое поперечное сечение с диаметром, постоянным по всей длине рамы. Элемент моделирует только силы, возникающие при выходе концевых точек из общей плоскости рамы. Схематический вид элемента представлен на Рис. 108.
Элемент представляет собой плоскую раму с четырьмя точками крепления. Рама имеет круглое поперечное сечение с диаметром, постоянным по всей длине рамы. Элемент моделирует только силы, возникающие при выходе концевых точек из общей плоскости рамы. Схематический вид элемента представлен на Рис. 108.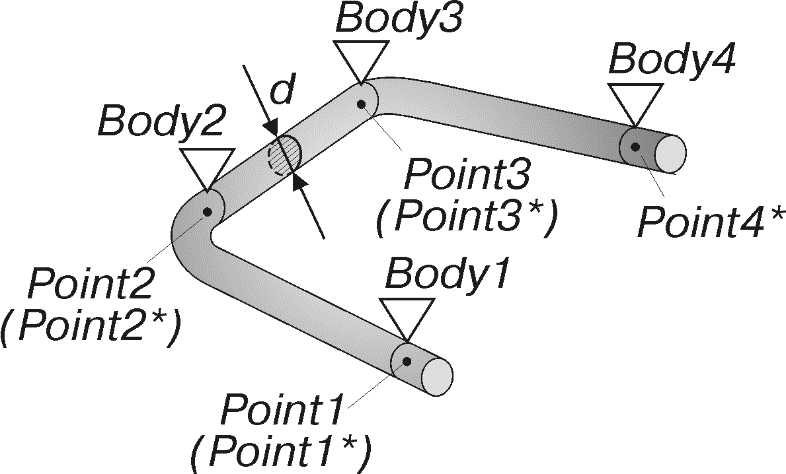
Рис. 108. Стабилизатор
В элементе можно выделить основание (часть рамы между точками Point2*, Point3*) и усы (части рамы между точками Point1*, Point2* и между точками Point3*, Point4*). Предполагается, что основание работает только на кручение, а усы работают только на изгиб в плоскости, перпендикулярной общей плоскости рамы.
Стабилизатор является симметричным относительно центральной плоскости кручения. Центральная плоскость кручения стабилизатора перпендикулярна прямой, соединяющей точки основания Point2* и Point3*, и расположена между ними на одинаковом расстоянии. Точка Point4* создается в программном комплексе автоматически по этому условию симметричности стабилизатора относительно центральной плоскости кручения.
В исходном положении механизма стабилизатор не оказывает силового воздействия на звенья.
Синтаксис метода создания
stabilizer(Body1, Point1, Body2, Point2, Body3, Point3, Body4, d, E, mu, damp=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Body1
Имя первого звена, на которое действует силовой элемент.
point Point1
Исходная точка силового воздействия элемента на первое звено. Копия этой точки Point1* прикрепляется к первому звену. Зеркальная копия точки Point1*, симметричная относительно центральной плоскости кручения, Point4* прикрепляется к четвертому звену. Точки Point1* и Point4* используются для расчета силового воздействия элемента.
body Body2
Имя второго звена, на которое действует силовой элемент.
point Point2
Исходная точка силового воздействия элемента на второе звено. Копия этой точки Point2* прикрепляется ко второму звену и используется для расчета силового воздействия элемента.
body Body3
Имя третьего звена, на которое действует силовой элемент.
point Point3
Исходная точка силового воздействия элемента на третье звено. Копия этой точки Point3* прикрепляется к третьему звену и используется для расчета силового воздействия элемента.
body Body4
Имя четвертого звена, на которое действует силовой элемент.
scalar d [length]
Диаметр поперечного сечения прутка стабилизатора.
 scalar E [force / length2]
scalar E [force / length2]Модуль упругости материала, из которого сделана балка.
 scalar mu [-]
scalar mu [-]Коэффициент Пуассона материала, из которого сделана балка.
Необязательные именованные параметры метода
 damp = scalar [time]
damp = scalar [time]Относительный коэффициент демпфирования элемента.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты».
Описание
При переводе проекта из режима редактирования в режим исследования для элемента выполняются следующие действия.
1. Создается точка Point1*, которая прикрепляется к звену Body1 и в момент создания совпадает с точкой Point1. Точка Point1* является точкой силового воздействия элемента на звено Body1.
2. Создается точка Point2*, которая прикрепляется к звену Body2 и в момент создания совпадает с точкой Point2. Точка Point2* является точкой силового воздействия элемента на звено Body2.
3. Создается точка Point3*, которая прикрепляется к звену Body3 и в момент создания совпадает с точкой Point3. Точка Point3* является точкой силового воздействия элемента на звено Body3.
4. Создается точка Point4*, которая прикрепляется к звену Body4. В момент создания она симметрична точке Point1 относительно центральной плоскости кручения. Точка Point4* является точкой силового воздействия элемента на звено Body4.
На Рис. 109 приведена собственная рабочая система координат стабилизатора. Ее центр совпадает с точкой Point2*. Ось Z совпадает с прямой, соединяющей точки основания Point2* и Point3*. Следовательно, плоскость XY является мгновенной плоскостью кручения стабилизатора. На рисунке показан  - приведенный угол закрутки стабилизатора.
- приведенный угол закрутки стабилизатора.
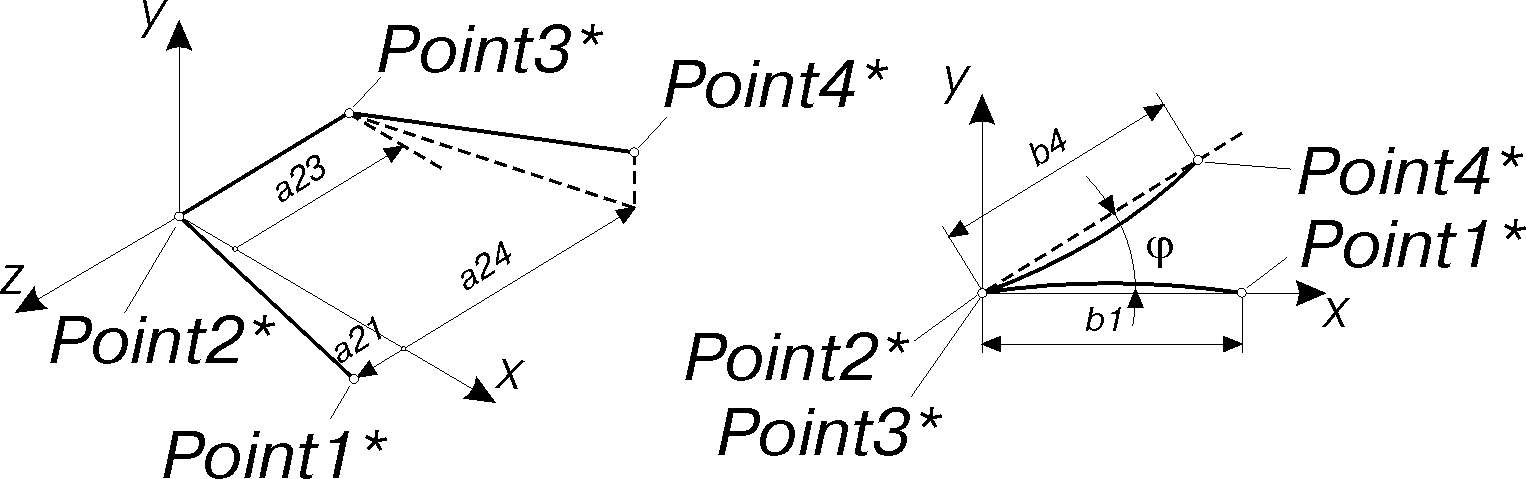
Рис. 109. Собственная рабочая система координат стабилизатора
Предполагается, что силы, действующие со стороны стабилизатора на точки Point1*, Point2*, Point3* и Point4*, параллельны мгновенной плоскости кручения стабилизатора. Их значения в собственной рабочей системе координат стабилизатора определяются следующими выражениями:
где  - приведенный коэффициент жесткости стабилизатора; - приведенный угол закрутки стабилизатора
- приведенный коэффициент жесткости стабилизатора; - приведенный угол закрутки стабилизатора  ,
,  ,
,  ,
,  ,
,  - расстояния, которые показаны на Рис. 109.
- расстояния, которые показаны на Рис. 109.
Приведенный коэффициент жесткости стабилизатора определяется в соответствии со следующим выражением:
где  - диаметр поперечного сечения прутка стабилизатора;
- диаметр поперечного сечения прутка стабилизатора;  - модуль упругости материала, из которого сделан стабилизатор;
- модуль упругости материала, из которого сделан стабилизатор;  - коэффициент Пуассона материала, из которого сделан стабилизатор;
- коэффициент Пуассона материала, из которого сделан стабилизатор;  - длина основания стабилизатора в исходном положении;
- длина основания стабилизатора в исходном положении;  - длина усов (одного) стабилизатора в исходном положении;
- длина усов (одного) стабилизатора в исходном положении;  - проекция длины усов (одного) стабилизатора в исходном положении на плоскость кручения стабилизатора.
- проекция длины усов (одного) стабилизатора в исходном положении на плоскость кручения стабилизатора.
Моменты, действующие со стороны стабилизатора на точки Point1*, Point2*, Point3* и Point4*, равны нулю.