4.3.20 Силовое взаимодействие точка-линия типа 1
 Элемент описывает силовое взаимодействие между точкой и линией. Линия образуется гладким соединением заданных точек, которые могут принадлежать разным звеньям. Следовательно, форма линии может изменяться в процессе движения механизма. На точку действуют упругая поперечная сила, направленная в сторону линии, сила поперечного демпфирования и сила продольного трения, которая возникает при движении точки вдоль линии. Значение упругой поперечной силы в каждый момент времени определяется функцией, зависящей от расстояния между точкой и линией. Значение упругой поперечной силы может также зависеть от значений датчиков, задаваемых пользователем. Схематический вид элемента представлен на Рис. 110.
Элемент описывает силовое взаимодействие между точкой и линией. Линия образуется гладким соединением заданных точек, которые могут принадлежать разным звеньям. Следовательно, форма линии может изменяться в процессе движения механизма. На точку действуют упругая поперечная сила, направленная в сторону линии, сила поперечного демпфирования и сила продольного трения, которая возникает при движении точки вдоль линии. Значение упругой поперечной силы в каждый момент времени определяется функцией, зависящей от расстояния между точкой и линией. Значение упругой поперечной силы может также зависеть от значений датчиков, задаваемых пользователем. Схематический вид элемента представлен на Рис. 110.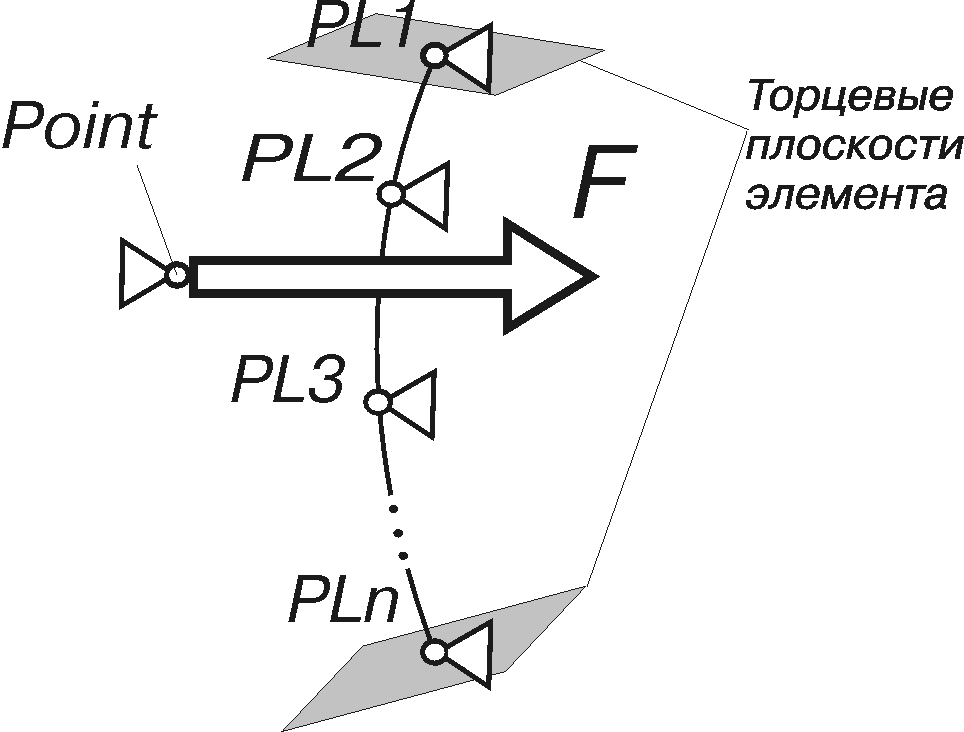
Рис. 110. Силовой элемент точка-линия типа 1
Силовой элемент автоматически выключается при выходе точки из зоны, ограниченной двумя торцевыми плоскостями элемента. Эти плоскости перпендикулярны к линии и проходят через ее крайние точки. В случае замкнутой линии силовой элемент не отключается, а работает «по кругу».
Более подробно работа силового элемента описана ниже.
Данный силовой элемент может использоваться для моделирования шпилек при разъединении конструкций, моделирования прохождения изделия в трубе и в других случаях.
Синтаксис метода создания
forcePointLine1(Point, list(PL1, ...), f_r, list(Sensor1, ...), forceZone=..., K_fr=…, F_fr1=…, normDamp=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
point Point
Точка, которая взаимодействует с линией. Точка должна быть прикреплена к звену.
list(point PL1, ...)
Список точек, образующих линию, которая взаимодействует с точкой Point. Точки должны быть расположены достаточно равномерно, и соединяющая их линия не должна иметь резких изгибов. Соотношение минимального и максимального расстояний между соседними точками не должно превышать 1:4. Направления прямых отрезков, соединяющих соседние точки, не должны отличаться более чем на 30 градусов. Необходимо, чтобы все точки списка были прикреплены к звеньям. При этом ни одна из точек не может быть прикреплена к тому же звену, что и точка Point.
function f_r [force]<[length], ...>
Функция упругой поперечной силы, действующей на точку Point. Она зависит от расстояния между точкой и линией. Кроме того, она может зависеть от значений других датчиков, задаваемых пользователем. При значении первого аргумента 0[m], значение функции должно быть равным 0[N].
list(sensor Sensor1, ...)
Список датчиков, от значений которых зависит функция упругой поперечной силы в дополнение к зависимости от расстояния между точкой и линией. Этот же список датчиков может использоваться для задания силы трения при продольном движении.
Необязательные именованные параметры метода
 forceZone = scalar [length]
forceZone = scalar [length]Размер зоны воздействия силового элемента на линию. Более подробно описание распределения силового воздействия на линию дано в описании элемента и представлено на Рис. 113. По умолчанию значение forceZone равно минимальному расстоянию между двумя соседними точками, образующими линию.
 K_fr = scalar [-]
K_fr = scalar [-]Коэффициент силы продольного трения, действующей при движении точки вдоль линии. По умолчанию K_fr = 0[-].
 F_fr1 = function [force]<[force], [length / time], …>
F_fr1 = function [force]<[force], [length / time], …>Функция силы продольного трения. Функция зависит от значения полной поперечной силы и скорости продольного движения точки. Она также может зависеть от значений датчиков, задаваемых пользователем. При значении второго аргумента 0[m/s], значение функции должно быть равным 0[N].
Параметры K_fr и F_fr1 несовместны, поэтому их одновременное задание недопустимо. В случае, если ни один из этих параметров не задан пользователем, используется значение K_fr принятое по умолчанию.
 normDamp = scalar [force time / length]
normDamp = scalar [force time / length]function [force]<[length / time]>
Параметр определяет характеристику поперечного демпфирования элемента. Параметр может иметь тип scalar или function. По умолчанию normDamp = 0 [N s/m].
normDamp = scalar [force time / length]
Коэффициент поперечного демпфирования элемента.
normDamp = function [force]<[length / time]>
Функция силы поперечного демпфирования. Функция зависит от скорости поперечного движения точки относительно линии. При значении аргумента 0[m/s], значение функции должно быть равным 0[N].
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты».
Описание
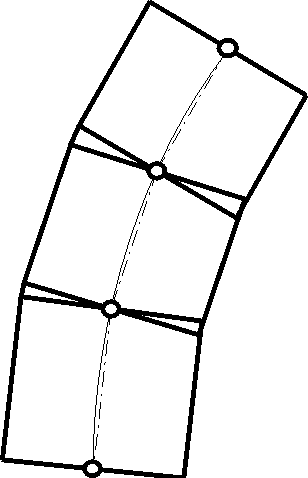
Перед расчетом силового элемента проверяется положение точки Point: находится ли она в рабочей зоне силового элемента. Рабочая зона определяется как трубка, имеющая вид ломаной, построенной по точкам линии. Пример рабочей зоны силового элемента представлен на Рис. 111. В качестве радиуса трубки используется минимальное расстояние между двумя соседними точками, образующими линию силового элемента. Если силовой элемент включен, а точка Point находится за пределами рабочей зоны, то диагностируется ошибка расчетной модели.
Для построения линии силового элемента по заданным точкам используется сплайн-интерполяция.
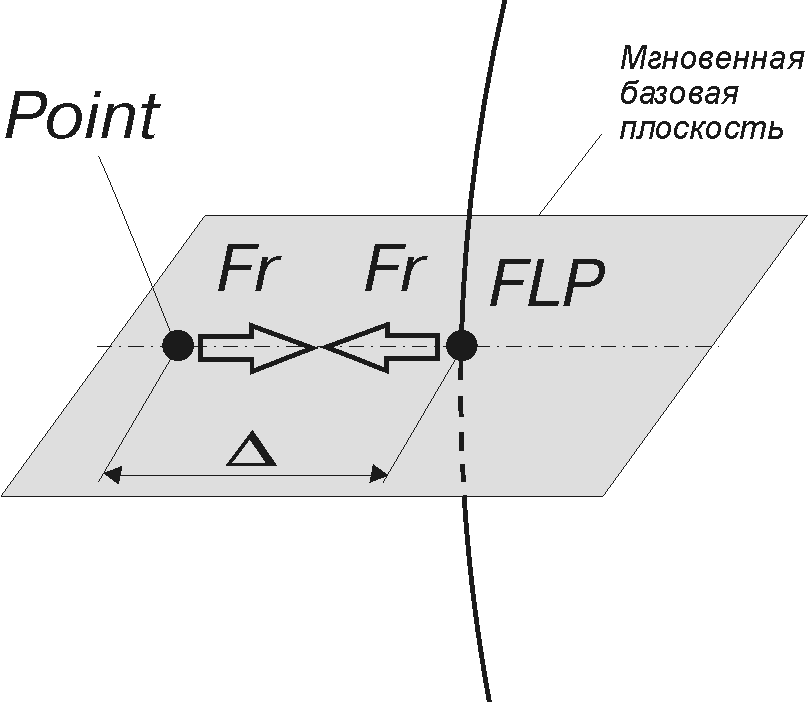
Расчетная схема силового элемента представлена на Рис. 112. Мгновенная базовая плоскость  силового элемента перпендикулярна линии и проходит через точку Point. Точка FLP является точкой пересечения линии с базовой плоскостью .
силового элемента перпендикулярна линии и проходит через точку Point. Точка FLP является точкой пересечения линии с базовой плоскостью .
Вектор силы, действующей в текущий момент времени на точку Point, равен сумме трех составляющих:
где  – вектор упругой поперечной силы;
– вектор упругой поперечной силы;  – вектор силы поперечного демпфирования;
– вектор силы поперечного демпфирования;  – вектор силы продольного трения.
– вектор силы продольного трения.
 |
 |
|
Рис. 111. Рабочая зона (трубка) силового элемента
|
Рис. 112. Расчетная схема силового элемента
|
Момент, действующий со стороны элемента на точку Point, равен нулю.
Направление положительного значения упругой поперечной силы, действующей на точку Point, совпадает с направлением вектора, проведенного из этой точки в точку FLP.
Значение упругой поперечной силы определяется в соответствии со следующим выражением:
где  - заданная функция упругой поперечной силы;
- заданная функция упругой поперечной силы;  - расстояние между точками Point и FLP;
- расстояние между точками Point и FLP;  – значения заданных датчиков, от которых зависит функция упругой силы в дополнение к зависимости от расстояния между точкой и линией.
– значения заданных датчиков, от которых зависит функция упругой силы в дополнение к зависимости от расстояния между точкой и линией.
При , равном нулю, значение функции должно быть равно нулю.
Число аргументов функции не должно превышать числа заданных датчиков в списке плюс один. Первый аргумент функции соответствует расстоянию между точкой и линией. Между следующими аргументами функции и списком датчиков устанавливается прямое порядковое соответствие. Другими словами, 2-й аргумент функции соответствует 1-му датчику в списке, 3-й аргумент функции соответствует 2-му датчику в списке и так далее, до исчерпания аргументов функции. Если число аргументов функции меньше числа датчиков в списке плюс один, то функция не зависит от значений датчиков, стоящих в списке последними. Первый аргумент функции должен иметь размерность длины. Размерности остальных аргументов функции должны быть равны размерностям соответствующих датчиков.
Датчики, от значений которых зависит функция силы в дополнение к зависимости от расстояния между точкой и линией, могут использоваться для моделирования прохождения изделия в трубе переменного диаметра.
Направление вектора силы поперечного демпфирования противоположно направлению скорости поперечного движения точки.
Расчет значения силы поперечного демпфирования зависит от типа параметра normDamp, определяющего характеристику поперечного демпфирования элемента.
При задании коэффициента демпфирования:
где  – заданный коэффициент поперечного демпфирования;
– заданный коэффициент поперечного демпфирования;  – проекция скорости точки относительно линии на мгновенную базовую плоскость элемента или скорость поперечного движения точки.
– проекция скорости точки относительно линии на мгновенную базовую плоскость элемента или скорость поперечного движения точки.
При задании функции силы:
где  – заданная функция силы поперечного демпфирования.
– заданная функция силы поперечного демпфирования.
Направление вектора силы продольного трения противоположно направлению скорости продольного движения точки. Если задан коэффициент трения  , то
, то
где  - значение полной поперечной силы,
- значение полной поперечной силы,  ,
,  ;
;  - модуль проекции скорости движения точки относительно линии на нормаль мгновенной базовой плоскости; определение функции
- модуль проекции скорости движения точки относительно линии на нормаль мгновенной базовой плоскости; определение функции  приведено в разделе «Силовое взаимодействие точка-поверхность».
приведено в разделе «Силовое взаимодействие точка-поверхность».
Если задана функция силы трения  , то
, то
где  – значения датчиков, заданных в списке элемента.
– значения датчиков, заданных в списке элемента.
Примеры задания функции  приведены в разделе «Силовое взаимодействие точка-поверхность».
приведены в разделе «Силовое взаимодействие точка-поверхность».
Задание силы продольного трения в виде функции может потребоваться, например, при моделировании движения тела в трубе, если тело обжато трубой и имеет из-за этого дополнительную составляющую в силе продольного трения.
Число аргументов функции силы продольного трения не должно превышать числа заданных датчиков в списке плюс два. Первый аргумент функции соответствует полной поперечной силе. Второй аргумент функции соответствует значению скорости продольного движения точки вдоль линии. Между следующими аргументами функции и списком датчиков устанавливается прямое порядковое соответствие. Другими словами, 3-й аргумент функции соответствует 1-му датчику в списке, 4-й аргумент функции соответствует 2-му датчику в списке и так далее, до исчерпания аргументов функции. Если число аргументов функции меньше числа датчиков в списке плюс два, то функция не зависит от значений датчиков, стоящих в списке последними. Первый аргумент функции должен иметь размерность силы. Второй аргумент функции должен иметь размерность скорости. Размерности остальных аргументов функции должны быть равны размерностям соответствующих датчиков.
Силовое воздействие элемента на линию определяется из условия самоуравновешенности сил, действующих на точку Point и линию со стороны элемента. Силовое воздействие на линию распределяется в виде сосредоточенных усилий (сил и моментов) на точки, образующие линию. Схема распределения усилий на линию представлена на Рис. 113. Поскольку все точки, образующие линию, прикреплены к звеньям, то силовые воздействия приходятся на соответствующие звенья. Увеличение размера зоны силового воздействия на линию, которое задается именованным параметром forceZone, приводит к более сглаженному поведению расчетной модели.
При моделировании некоторых механизмов может возникнуть необходимость включить элемент в процессе работы механизма. Это производится при помощи метода Включение силового элемента, который имеется в объектах типа изменение механизма (reform). Силовой элемент может быть включен только при нахождении точки Point в зоне линии (в трубке).
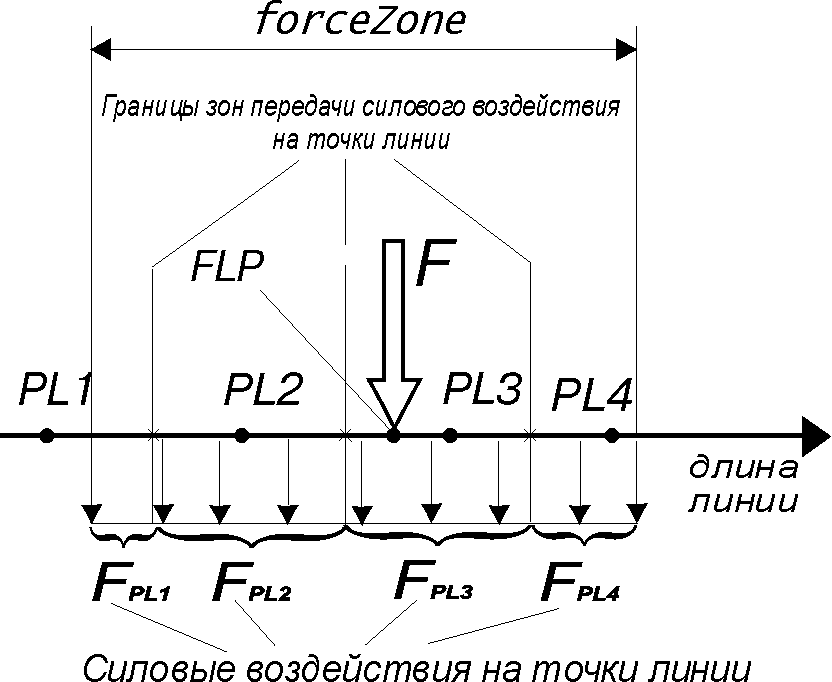
Рис. 113. Распределение силового воздействия на точки линии
Силовой элемент автоматически выключается при выходе точки Point из зоны, ограниченной двумя торцевыми плоскостями элемента (за исключением случая, когда линия замкнута). Торцевые плоскости перпендикулярны к линии и проходят через ее крайние точки. Это обстоятельство необходимо учитывать при задании исходного положения элемента и при его включении в процессе работы механизма. Если в исходном состоянии или при включении элемента точка Point совпадает с одной из крайних точек, образующих линию, то даже при малом смещении точки Point наружу от торцевой плоскости, проходящей через эту крайнюю точку, произойдет автоматическое выключение элемента. На Рис. 114 представлены примеры задания шпильки с помощью рассматриваемого элемента. Вариант а) является нежелательным, так как при смещении вниз звена «отверстие» элемент будет выключен, что неправильно с точки зрения работы этого узла. Вариант б) является предпочтительным. В этом случае обеспечивается работа элемента при возможных перемещениях звена «отверстие» вниз относительно «шпильки».
Внутренние системные объекты
sensor delta [length]
Расстояние между точкой и линией силового элемента. Датчик имеет значение только при включенном элементе.
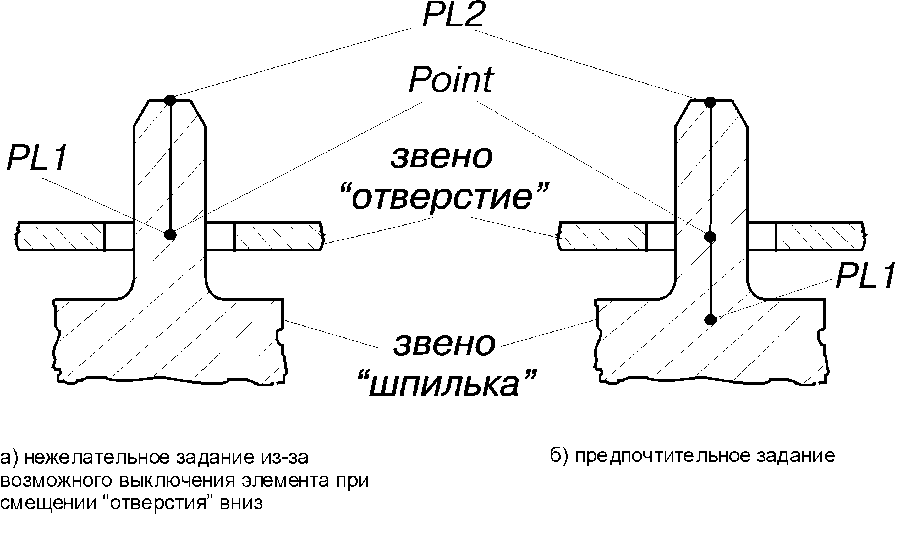
Рис. 114. Примеры задания шпильки