4.4 Аэродинамическая сила
 Данный силовой элемент используется для задания аэродинамических сил и моментов, действующих на одно звено с близкими аэродинамическими характеристиками в плоскостях тангажа и рыскания.
Данный силовой элемент используется для задания аэродинамических сил и моментов, действующих на одно звено с близкими аэродинамическими характеристиками в плоскостях тангажа и рыскания.При формировании силового элемента задается базовый узел задания аэродинамических коэффициентов Node. Вектор X узла Node задает направление продольной оси звена. Вектор Y узла Node задает направление нормальной оси звена. Вектор Z узла Node задает направление поперечной оси звена. Для расчетов создается копия базового узла Node*, которая прикрепляется к звену. Схематический вид силового элемента представлен на рис. 5.
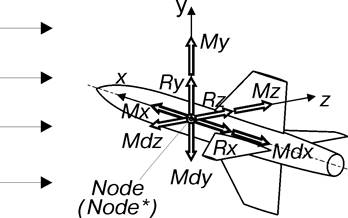
Рис. 5. Аэродинамическая сила
Продольная аэродинамическая сила Rx направлена вдоль вектора X узла Node*. Нормальная аэродинамическая сила Ry направлена вдоль вектора Y узла Node*. Поперечная аэродинамическая сила Rz направлена вдоль вектора Z узла Node*. Момент крена Mx и демпфирующий момент крена Mdx направлены вдоль вектора X узла Node*. Момент рыскания My и демпфирующий момент рыскания Mdy направлены вдоль вектора Y узла Node*. Момент тангажа Mz и демпфирующий момент тангажа Mdz направлены вдоль вектора Z узла Node*. Значения аэродинамических сил и моментов определяются на основании характеристик среды, заданных коэффициентов аэродинамических сил и моментов. Продольная, нормальная и поперечная аэродинамические силы приложены в центре узла Node*.
В силовом элементе определена точка взаимодействия звена со средой. В этой точке определяются параметры набегающего потока, визуализируются сам силовой элемент и векторы его аэродинамических сил и моментов. По умолчанию, если не задан ключевой параметр pointFlow, точка взаимодействия звена со средой совпадает с центром узла Node*.
Коэффициенты аэродинамических сил и моментов задаются в виде функций, зависящих от основных параметров движения. К ним относятся: пространственный угол атаки  , угол атаки
, угол атаки  , угол скольжения
, угол скольжения  , число
, число  движения и угловая скорость звена. Пространственный угол атаки может изменяться в интервале от 0 до 180°. Угол атаки может изменяться в интервале от –180 до +180°. Угол скольжения может изменяться в интервале от –90 до +90°. В силовом элементе используются коэффициенты аэродинамических сил и моментов в системе координат, связанной со звеном.
движения и угловая скорость звена. Пространственный угол атаки может изменяться в интервале от 0 до 180°. Угол атаки может изменяться в интервале от –180 до +180°. Угол скольжения может изменяться в интервале от –90 до +90°. В силовом элементе используются коэффициенты аэродинамических сил и моментов в системе координат, связанной со звеном.
Пользователь может задать датчики, от значений которых зависят функции аэродинамических коэффициентов в дополнение к зависимости от основных параметров движения.
Синтаксис метода создания
aerodynamics4(Flow, Body, Node, Sa, L, flagS, fCx, fCy, fCz, fMx, fMy, fMz, fMdx, fMdy, fMdz, list(Sensor1, ...), pointFlow=…, work=..., color=..., visible=...)
Обязательные позиционные параметры метода
medium Flow
body Body
Имя звена, на которое действует аэродинамическая сила.
node Nоde
Исходный базовый узел задания аэродинамических коэффициентов. Копия этого узла Node* прикрепляется к звену и используется при расчете аэродинамических сил и моментов.
scalar Sa [length2]
Аэродинамическая площадь, относительно которой определены коэффициенты аэродинамических сил и моментов.
scalar L [length]
Характерный линейный размер, относительно которого определены коэффициенты аэродинамических моментов.
flagS = [aeroSymmetrical:/noAeroSymmetrical:]
Параметр определяет симметрию аэродинамических характеристик относительно значений углов атаки  и скольжения
и скольжения  в плоскостях тангажа и рыскания.
в плоскостях тангажа и рыскания.
 flagS = aeroSymmetrical:
flagS = aeroSymmetrical:Аэродинамические характеристики в плоскостях тангажа и рыскания симметричны относительно значений углов атаки и скольжения . В этом случае функции аэродинамических коэффициентов задаются для угла атаки в интервале от 0 до 180°, а для угла скольжения в интервале от 0 до 90°.
 flagS = noAeroSymmetrical:
flagS = noAeroSymmetrical:Симметрия аэродинамических характеристик относительно значений углов атаки и скольжения в плоскостях тангажа и рыскания отсутствует. В этом случае функции аэродинамических коэффициентов задаются для полных интервалов возможных значений углов атаки от –180 до 180° и скольжения от –90 до 90°.
function fCx [-]<[angle], [-], ...>
Функция коэффициента продольной аэродинамической силы, направленной вдоль вектора X узла Node*. Положительное значение коэффициента соответствует продольной силе, направленной в сторону, противоположную вектору X узла Node*. Функция зависит от пространственного угла атаки  и числа
и числа  движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fCy [-]<[angle], [-], ...>
Функция коэффициента нормальной аэродинамической силы, направленной вдоль вектора Y узла Node*. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fCz [-]<[angle], [-], ...>
Функция коэффициента поперечной аэродинамической силы, направленной вдоль вектора Z узла Node*. Функция зависит от угла скольжения и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fMx [-]<[angle], [-], ...>
Функция коэффициента момента крена, направленного вдоль вектора X узла Node*. Функция зависит от пространственного угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fMy [-]<[angle], [-], ...>
Функция коэффициента момента рыскания, направленного вдоль вектора Y узла Node*. Функция зависит от угла скольжения и числа  движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fMz [-]<[angle], [-], ...>
Функция коэффициента момента тангажа, направленного вдоль вектора Z узла Node*. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fMdx [1/ angle]<[angle], [-], ...>
Функция производной коэффициента демпфирующего момента крена, направленного вдоль вектора X узла Node*. Функция должна быть отрицательной. Это соответствует направлению демпфирующего момента крена в сторону, противоположную проекции вектора угловой скорости звена на вектор X узла Node*. Функция зависит от пространственного угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fMdy [1/ angle]<[angle], [-], ...>
Функция производной коэффициента демпфирующего момента рыскания, направленного вдоль вектора Y узла Node*. Функция должна быть отрицательной. Это соответствует направлению демпфирующего момента рыскания в сторону, противоположную проекции вектора угловой скорости звена на вектор Y узла Node*. Функция зависит от угла скольжения и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fMdz [1/ angle]<[angle], [-], ...>
Функция производной коэффициента демпфирующего момента тангажа, направленного вдоль вектора Z узла Node*. Функция должна быть отрицательной. Это соответствует направлению демпфирующего момента в сторону, противоположную проекции вектора угловой скорости звена на вектор Z узла Node*. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
list(sensor Sensor1, ...)
Список датчиков, от значений которых зависят функции fCx, fCy, fCz, fMx, fMy, fMz, fMdx, fMdy и fMdz в дополнение к зависимости от основных параметров движения.
Необязательные именованные параметры метода
 pointFlow = point
pointFlow = pointТочка взаимодействия звена со средой. Копия этой точки pointFlow* прикрепляется к звену. В точке pointFlow* определяются параметры набегающего потока, визуализируются сам силовой элемент и векторы его аэродинамических сил и моментов.
По умолчанию, если параметр pointFlow не задан, точка взаимодействия звена со средой совпадает с центром узла Node*.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты» книги «Описание объектов многокомпонентной механической системы».
Внутренние системные объекты
sensor alphaSpace [angle]
Пространственный угол атаки – угол между вектором X узла Node* и вектором скорости звена относительно среды в точке взаимодействия звена со средой.
sensor alfa [angle]
Угол атаки – угол между вектором X узла Node* и проекцией вектора скорости звена относительно среды в точке взаимодействия звена со средой на плоскость XY узла Node*.
sensor beta [angle]
Угол скольжения – угол между вектором скорости звена относительно среды в точке взаимодействия звена со средой и плоскостью XY узла Node*.
sensor velocity [length/time]
Скорость звена относительно среды в точке взаимодействия звена со средой.
sensor Mach [-]
Число М – отношение скорости звена относительно среды к скорости звука в ней.
Описание
При расчете силового элемента в каждый момент времени определяются следующие параметры взаимодействия звена со средой:
Все параметры взаимодействия звена со средой определяются в точке pointFlow, если она задана. Иначе в центре узла Node*. Проекции угловой скорости  ,
,  и
и  определяются как угловые скорости звена относительно базового узла среды.
определяются как угловые скорости звена относительно базового узла среды.
Значения аэродинамических коэффициентов определяются следующим образом.
Коэффициент продольной аэродинамической силы
где  – заданная функция коэффициента продольной аэродинамической силы;
– заданная функция коэффициента продольной аэродинамической силы;
Коэффициент нормальной аэродинамической силы
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где  – заданная функция коэффициента нормальной аэродинамической силы.
– заданная функция коэффициента нормальной аэродинамической силы.
Коэффициент поперечной аэродинамической силы
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где  – заданная функция коэффициента поперечной аэродинамической силы.
– заданная функция коэффициента поперечной аэродинамической силы.
Коэффициент аэродинамического момента крена
где  – заданная функция коэффициента аэродинамического момента крена.
– заданная функция коэффициента аэродинамического момента крена.
Коэффициент аэродинамического момента рыскания
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где  – заданная функция коэффициента аэродинамического момента рыскания.
– заданная функция коэффициента аэродинамического момента рыскания.
Коэффициент аэродинамического момента тангажа
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где  – заданная функция коэффициента аэродинамического момента тангажа.
– заданная функция коэффициента аэродинамического момента тангажа.
Производная коэффициента демпфирующего момента крена
где  – заданная функция производной коэффициента демпфирующего момента крена.
– заданная функция производной коэффициента демпфирующего момента крена.
Производная коэффициента демпфирующего момента рыскания
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где  – заданная функция производной коэффициента демпфирующего момента рыскания.
– заданная функция производной коэффициента демпфирующего момента рыскания.
Производная коэффициента демпфирующего момента тангажа
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где  – заданная функция производной коэффициента демпфирующего момента тангажа.
– заданная функция производной коэффициента демпфирующего момента тангажа.
Число аргументов в функциях
|
Значение продольной аэродинамической силы равно
где  – скоростной напор набегающего потока;
– скоростной напор набегающего потока;
Положительное значение продольной силы  соответствует направлению, противоположному вектору X узла Node*.
соответствует направлению, противоположному вектору X узла Node*.
Значение нормальной аэродинамической силы равно
Положительное значение нормальной силы  соответствует направлению вектора Y узла Node*.
соответствует направлению вектора Y узла Node*.
Значение поперечной аэродинамической силы равно
Положительное значение поперечной силы соответствует направлению вектора Z узла Node*. При положительном угле скольжения сила имеет отрицательное значение.
соответствует направлению вектора Z узла Node*. При положительном угле скольжения сила имеет отрицательное значение.
Значение аэродинамического момента крена равно
Положительное значение момента  соответствует направлению вектора X узла Node*.
соответствует направлению вектора X узла Node*.
Значение аэродинамического момента рыскания равно
Положительное значение момента  соответствует направлению вектора Y узла Node*.
соответствует направлению вектора Y узла Node*.
Значение аэродинамического момента тангажа равно
Значение демпфирующего момента крена равно
Значение демпфирующего момента рыскания равно
Момент  направлен в сторону, противоположную вектору проекции угловой скорости звена.
направлен в сторону, противоположную вектору проекции угловой скорости звена.
Значение демпфирующего момента тангажа равно
Момент  направлен в сторону, противоположную вектору проекции угловой скорости звена.
направлен в сторону, противоположную вектору проекции угловой скорости звена.