4.6 Аэродинамическая сила на осесимметричный летательный аппарат с аэродинамическими рулями управления
 Данный элемент позволяет моделировать аэродинамическое воздействие на осесимметричный летательный аппарат (ЛА) с аэродинамическими рулями управлениями, установленными в одной поперечной плоскости с постоянным угловым шагом. Аэродинамические характеристики (АДХ) задаются в файле формата «*.xml».
Данный элемент позволяет моделировать аэродинамическое воздействие на осесимметричный летательный аппарат (ЛА) с аэродинамическими рулями управлениями, установленными в одной поперечной плоскости с постоянным угловым шагом. Аэродинамические характеристики (АДХ) задаются в файле формата «*.xml».Синтаксис метода создания
aerodynamics6(Flow, Body, NodeAero, File, fiR1, nR, deltaR = list(Sensor1, …), pointFlow =…, existBottomResistance=…, work=..., color=..., visible=...)
Обязательные позиционные параметры
medium Flow
body Body
Имя звена, на которое действует аэродинамическая сила.
node NodeAero
Исходный базовый узел задания аэродинамических коэффициентов. Ось X узла должна быть направлена вдоль оси симметрии ЛА. Копия этого узла NodeAero* прикрепляется к звену и используется при расчете аэродинамических сил.
string File
Строка с адресом файла, содержащим таблицы, задающие АДХ.
Формат файла описан ниже.
scalar fiR1 [angle]
Угол установки первого аэродинамического руля относительно плоскости XOY узла NodeAero.
scalar nR [-]
Число аэродинамических рулей.
list deltaR = list(sensor Sensor1, …)
Список углов отклонения аэродинамических рулей.
Необязательные именованные параметры метода
 pointFlow = point
pointFlow = pointТочка взаимодействия звена со средой. Копия этой точки pointFlow* прикрепляется к звену. В точке pointFlow* определяются параметры набегающего потока, визуализируются сам силовой элемент и векторы его аэродинамических сил и моментов.
По умолчанию, если параметр pointFlow не задан, точка взаимодействия звена со средой совпадает с центром узла NodeAero*.
 existBottomResistance = sensor[-]
existBottomResistance = sensor[-]Наличие донного сопротивления. По умолчанию и при значении датчика «0» донное сопротивление отсутствует, при любом другом присутствует.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты» книги «Описание объектов многокомпонентной механической системы».
Внутренние системные объекты
sensor alphaS [angle]
Пространственный угол атаки.
sensor phiS [angle]
Аэродинамический угол крена.
sensor velocity [length/time]
sensor Mach [-]
Число М – отношение скорости звена относительно среды к скорости звука в ней.
Формат файла данных
Все данные задаются в файле формата «*.xml». Содержимое файла обрамляется открывающим тегом <Aero_SR> и закрывающим тегом </Aero_SR>. В открывающем теге обязательно должны быть заданы атрибуты  и
и  , имеющие значения и размерность характерной аэродинамической площади ЛА и характерного аэродинамического размера ЛА соответственно.
, имеющие значения и размерность характерной аэродинамической площади ЛА и характерного аэродинамического размера ЛА соответственно.
АДХ задаются в системе координат OXNB, связанной с потоком. Продольная ось OX совпадает с осью симметрии ЛА, нормальная ось ON лежит в плоскости потока и направлена вверх, боковая ось OB дополняет их до правой тройки.
АДХ, зависящие только от числа Маха  , задаются в таблице с тегом <CxmW> в формате файла TBL. Значения должны быть отсортированы по возрастанию числа . Таблица должна иметь следующие столбцы, приведенные в строгой последовательности, представленной ниже:
, задаются в таблице с тегом <CxmW> в формате файла TBL. Значения должны быть отсортированы по возрастанию числа . Таблица должна иметь следующие столбцы, приведенные в строгой последовательности, представленной ниже:
M – число Маха ;
Cd0 – коэффициент донного сопротивления  ;
;
mxWx – производная коэффициента демпфирующего момента по безразмерной угловой скорости относительно оси OX  ;
;
mW – производная коэффициента демпфирующего момента по безразмерной угловой скорости относительно оси в поперечной плоскости NB  .
.
Таблицы c аэродинамическими коэффициентами, зависящими от пространственного угла атаки  и числа Маха в заданных диапазонах углов отклонения рулей
и числа Маха в заданных диапазонах углов отклонения рулей  ,
,  ,
,  или аэродинамического угла крена
или аэродинамического угла крена  , задаются в формате файла TB2. Теги этих таблиц должны совпадать с обозначениями величин:
, задаются в формате файла TB2. Теги этих таблиц должны совпадать с обозначениями величин:
Cx – коэффициент продольной силы  , действующей вдоль оси OX;
, действующей вдоль оси OX;
Cn – коэффициент нормальной силы  , действующей вдоль оси ON;
, действующей вдоль оси ON;
Cb – коэффициент боковой силы  , действующей вдоль оси OB;
, действующей вдоль оси OB;
mX – коэффициент статического момента относительно оси OX  ;
;
mB – коэффициент статического момента относительно оси OB  ;
;
mN – коэффициент статического момента относительно оси ON  .
.
Данные должны располагаться по возрастанию числа  сверху вниз, и по возрастанию слева направо. Таблицы в XML-файле могут располагаться в любом порядке.
сверху вниз, и по возрастанию слева направо. Таблицы в XML-файле могут располагаться в любом порядке.
Промежуточные значения заданных величин определяются при помощи линейной интерполяции. При выходе числа за пределы заданного диапазона значения всех коэффициентов принимаются равными при крайних значениях числа .
Пространственный угол атаки изменяется в диапазоне  . Поэтому для корректного моделирования необходимо задавать значения коэффициентов во всем диапазоне изменения пространственного угла атаки. Иначе, при выходе за пределы заданного диапазона, значения будут определяться с помощью линейной интерполяции.
. Поэтому для корректного моделирования необходимо задавать значения коэффициентов во всем диапазоне изменения пространственного угла атаки. Иначе, при выходе за пределы заданного диапазона, значения будут определяться с помощью линейной интерполяции.
Перечисленные выше таблицы в зависимости от и могут иметь один из следующих атрибутов:
fiS – аэродинамический угол крена , значения для которого введены в таблице;
dX – эквивалентный угол отклонения рулей по крену , значения для которого введены в таблице;
dN – эквивалентный угол отклонения рулей в плоскости потока , значения для которого введены в таблице;
dB – эквивалентный угол отклонения рулей в поперечной плоскости , значения для которого введены в таблице.
При отсутствии какого-либо атрибута считается, что соответствующий ему угол равен нулю.
Файл данных обязательно должен содержать следующие таблицы:
Принимается, что в таблицах, содержащих данные для первых 6 приведенных выше функций, никакие атрибуты не указываются. В остальных секциях необходимо указывать только атрибут для одного угла, не равного нулю.
Файлы может содержать следующие таблицы зависимостей АДХ от аэродинамического угла крена в случае их наличия:
Поскольку ЛА считает осесимметричным и рули установлены в одной поперечной плоскости в постоянным угловым шагом, то имеет место периодичность изменения АДХ по аэродинамическому углу крена и их симметрия на периоде. Период изменения АДХ равен  , где
, где  – число аэродинамических рулей. Вследствие симметрии требуемый интервал задания АДХ сокращается до
– число аэродинамических рулей. Вследствие симметрии требуемый интервал задания АДХ сокращается до  .
.
При задании таблиц зависимости АДХ от аэродинамического угла крена, обязательным является наличие только таблицы при  . В случае задания только одной таблицы зависимость аэродинамических коэффициентов от будет представлять из себя синусоиду.
. В случае задания только одной таблицы зависимость аэродинамических коэффициентов от будет представлять из себя синусоиду.
Для учета перекрестного влияния поворотов рулей на АДХ дополнительно могут быть заданы необязательные секции со следующими таблицами:
Значение каждого коэффициента в диапазоне эквивалентного угла определяется с помощью линейной интерполяции между заданными таблицами. Для корректного моделирования необходимо задать таблицы для коэффициентов в положительном и отрицательном диапазоне  , кроме коэффициента продольной силы , который необходимо задать в диапазоне
, кроме коэффициента продольной силы , который необходимо задать в диапазоне  , так как предполагается симметрия продольной силы от угла поворота рулей. В случае отсутствия таблицы в положительном или отрицательном диапазоне, значение коэффициента будет результатом экстраполяция между нулевым и ближайшем к нулю имеющимся значением эквивалентного угла. Если угол отклонения руля выходит за пределы заданных таблиц, то значение коэффициента будет результатом экстраполяции между двумя ближайшими таблицами.
, так как предполагается симметрия продольной силы от угла поворота рулей. В случае отсутствия таблицы в положительном или отрицательном диапазоне, значение коэффициента будет результатом экстраполяция между нулевым и ближайшем к нулю имеющимся значением эквивалентного угла. Если угол отклонения руля выходит за пределы заданных таблиц, то значение коэффициента будет результатом экстраполяции между двумя ближайшими таблицами.
Пример файла данных
<Aero_SR Sa="0.0707 [ m2 ]" La="7.6 [ m ]">
<CxmW>
4 //число столбцов данных (1 аргумент + N функций)
M [] //Число Маха
Cd [] //Коэфф-т донного сопротивления
mxWx [] //Коэфф-т производной демпф. момента крена
mW [] //Коэфф-т производной демпф. момента вокруг оси в поперечной плоскости NB
//M Cd mxWx mW
0.4 0.0970 -0.00070 -0.9000
0.8 0.1040 -0.00072 -0.9800
</CxmW>
<Cx>
5 //Количество столбцов значений функции
Cx [] //Коэфф-т продольной силы (функция)
alfaS [deg] //Пространственный угол атаки (столбцы)
0 4 8 12 16 //Значения alfaS для столбцов
M [] //число Маха (строки)
//М \ alfaS 0 4 8 12 16
0.4 0.3047 0.2550 0.3121 0.2772 0.3300
0.8 0.3476 0.3367 0.3719 0.3596 0.3837
</Cx>
<mx dX="20 [deg]">
5 //Количество столбцов значений функции
mx [] //Коэфф-т статического момента крена (функция)
alfaS [deg] //Пространственный угол атаки (столбцы)
0 4 8 12 16 //Значения alfaS для столбцов
M [] //число Маха (строки)
//М \ alfaS 0 4 8 12 16
0.4 0.003851 0.004780 0.005930 0.006720 0.006900
0.8 0.003977 0.004960 0.006203 0.006933 0.007113
</mx>
<…>
…
</…>
</Aero_SR>
|
Математическая модель
Все АДХ задаются в системе координата OXNB, подробно описанной в разделе «Аэродинамическая сила на осесимметричный неуправляемый летательный аппарат». Предполагается, что ЛА представляет собой осесимметричное тело с одинаковыми аэродинамическими рулями, установленными в одной поперечной плоскости с постоянным угловым шагом. Повороты рулей 
 приводятся к трем индивидуальным эквивалентным поворотам по каналам управления:
приводятся к трем индивидуальным эквивалентным поворотам по каналам управления:
Эквивалентный угол поворота рулей по каналу управления определяется как сумма индивидуальных эквивалентных поворотов рулей по этому каналу:
В качестве исходных данных в зависимости от пространственного угла атаки  и числа Маха
и числа Маха  задаются следующие величины в диапазонах эквивалентных углов
задаются следующие величины в диапазонах эквивалентных углов  или аэродинамического угла крена :
или аэродинамического угла крена :
Все АДХ определены относительно характерной аэродинамической площади и характерной аэродинамической длины ЛА.
Все параметры взаимодействия звена со средой определяются в точке pointFlow*, если она задана. Иначе в центре узла NodeAero*.
Силы и моменты, действующие на ЛА, определяются следующим образом.
Продольная сила:
где  – скоростной напор;
– скоростной напор;
Нормальная сила в плоскости потока:
Боковая сила в боковой плоскости:
Момент относительно оси OX:
где  – угловая скорость ЛА относительно оси OX;
– угловая скорость ЛА относительно оси OX;
Момент нормальной силы в плоскости потока:
где  – угловая скорость ЛА относительно оси OB.
– угловая скорость ЛА относительно оси OB.
Момент нормальной силы в плоскости потока:
где  – угловая скорость ЛА относительно оси ON.
– угловая скорость ЛА относительно оси ON.
Эквивалентные углы отклонения рулей
Эквивалентное отклонение руля по какому-либо каналу – это такое отклонение руля в положении максимальной эффективности, которое создает аналогичное аэродинамическое воздействие. При этом эквивалентность воздействия определяется при допущении о линейной зависимости подъемной силы, создаваемой рулем, от угла поворота руля.
Поворот i-го руля считается положительным, если создает положительный момент относительно оси OX. Таким образом, эквивалентный угол поворота i-го руля по крену равен повороту руля по величине и совпадает по знаку:
Максимальную эффективность при создании силы вдоль нормальной оси руль имеет, когда его ось вращения лежит в боковой плоскости. Выражение для эквивалентного угла отклонения руля в плоскости потока выглядит следующим образом:
где  – угол крена i-го руля. Углом крена руля называется угол между осью его вращения и осью ON.
– угол крена i-го руля. Углом крена руля называется угол между осью его вращения и осью ON.
Угол крена руля вычисляется по следующей формуле:
где  – угол установки i-го руля, то есть угол между осью его вращения и осью ON при
– угол установки i-го руля, то есть угол между осью его вращения и осью ON при  .
.
Максимальную эффективность при создании силы вдоль боковой оси руль имеет, когда его ось вращения лежит в плоскости потока. Выражение для эквивалентного угла отклонения руля в боковой плоскости выглядит следующим образом:
На рис. 2 показано направление отсчета углов установки рулей  и положительное направление аэродинамического угла крена
и положительное направление аэродинамического угла крена  , где OXYZ – связанная с ЛА система координат.
, где OXYZ – связанная с ЛА система координат.
Рассмотрим пример расчета эквивалентных углов для ЛА с 4-мя X-образно расположенными рулями углы установки рулей будут равны:
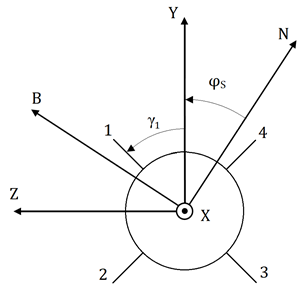
Рис. 2. Углы установки рулей и положительное
направление аэродинамического угла крена
направление аэродинамического угла крена
Пусть  . Тогда нормальная ось ON направлена вдоль руля 2. Чтобы создать положительный момент тангажа, необходимо отклонить установленные спереди рули на
. Тогда нормальная ось ON направлена вдоль руля 2. Чтобы создать положительный момент тангажа, необходимо отклонить установленные спереди рули на  так, чтобы:
так, чтобы:
Тогда эквивалентные углы будут равны:
Параметры в плоскости потока
Коэффициент нормальной силы вычисляется по следующей формуле:
где  – зависимость
– зависимость  при нулевых значениях
при нулевых значениях  ,
,  , ;
, ;
Коэффициент зависимости нормальной силы от крена вычисляется по следующей формуле:
 ,
,где  – зависимость
– зависимость  при нулевых значениях
при нулевых значениях  , , , ;
, , , ;
Добавок от поворота рулей в боковой плоскости вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Добавок от поворота рулей в поперечной плоскости вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Коэффициент статического момента относительно боковой оси OB вычисляется по следующей формуле:
где  – зависимость
– зависимость  при нулевых значениях , , ;
при нулевых значениях , , ;
Коэффициент зависимости статического момента относительно боковой оси OB от крена вычисляется по следующей формуле:
 ,
,где  – зависимость
– зависимость  при нулевых значениях , , , ;
при нулевых значениях , , , ;
Добавок от поворота рулей в боковой плоскости вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Добавок от поворота рулей в поперечной плоскости вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Параметры в боковой плоскости
Коэффициент боковой силы вычисляется по следующей формуле:
где  – зависимость
– зависимость  при нулевых значениях , , ;
при нулевых значениях , , ;
Коэффициент зависимости боковой силы от крена вычисляется по следующей формуле:
 ,
,где  – зависимость
– зависимость  при нулевых значениях , , , ;
при нулевых значениях , , , ;
Добавок от поворота рулей в плоскости потока вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Добавок от поворота рулей в поперечной плоскости вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Коэффициент момента относительно нормальной оси ON вычисляется по следующей формуле:
где  – зависимость
– зависимость  при нулевых значениях
при нулевых значениях  , , ;
, , ;
Коэффициент зависимости статического момента относительно нормальной оси ON от крена вычисляется по следующей формуле:
 ,
,где  – зависимость
– зависимость  при нулевых значениях , , , ;
при нулевых значениях , , , ;
Добавок от поворота рулей в плоскости потока вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Добавок от поворота рулей в поперечной плоскости вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Параметры относительно продольной оси
Коэффициент лобового сопротивления рассчитывается по формуле:
где  – таблично заданная зависимость
– таблично заданная зависимость  при нулевых значениях , , ;
при нулевых значениях , , ;
Коэффициент зависимости продольной силы от крена вычисляется по следующей формуле:
 ,
,где  – зависимость
– зависимость  при нулевых значениях , , , ;
при нулевых значениях , , , ;
Добавок от поворота рулей в плоскости потока вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Добавок от поворота рулей в боковой плоскости вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях , , .
при нулевых значениях , , .
Коэффициент статического момента относительно продольной оси вычисляется по следующей формуле:
где  – зависимость
– зависимость  при нулевых значениях , , ;
при нулевых значениях , , ;
Коэффициент зависимости момента относительно оси OX от крена вычисляется по следующей формуле:
 ,
,где  – зависимость
– зависимость  при нулевых значениях , ,
при нулевых значениях , ,  , ;
, ;
Добавок от поворота рулей в плоскости потока вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях
при нулевых значениях  , , .
, , .
Добавок от поворота рулей в боковой плоскости вычисляется по формуле:
где  – зависимость
– зависимость  при нулевых значениях ,
при нулевых значениях ,  , .
, .