4.1.47 Альфа-бета фильтр
Считается, что измеренное на каждом шаге значение исходного датчика имеет следующий вид:
где  – номер шага измерения значения исходного датчика;
– номер шага измерения значения исходного датчика;
Отфильтрованное значение и его производная по времени определяются в каждой точке измерения исходного датчика по следующим формулам:
где  – отфильтрованное значение исходного датчика на k-м шаге, которое приблизительно равно
– отфильтрованное значение исходного датчика на k-м шаге, которое приблизительно равно  ;
;
Прогнозируемые значения вычисляются по следующим формулам:
На k-м шаге расчёта фильтра алгоритм работает следующим образом:
1)  :
:  ;
;
2)  :
:
−  ;
;
−  ;
;
−  ;
;
−  ;
;
3)  :
:
−  ;
;
−  ;
;
;−  ;
;
−  .
.
Коэффициенты  – константы. Для сходимости и стабильности значения коэффициентов должны быть положительными и малыми:
– константы. Для сходимости и стабильности значения коэффициентов должны быть положительными и малыми:
−  ;
;
−  .
.
В качестве начального приближения можно взять  . Значения коэффициентов обычно корректируются экспериментально. Как правило, более высокие значения обычно приводят к более быстрой реакции для отслеживания переходных изменений, в то время как меньшие снижают уровень шума в оценках состояния.
. Значения коэффициентов обычно корректируются экспериментально. Как правило, более высокие значения обычно приводят к более быстрой реакции для отслеживания переходных изменений, в то время как меньшие снижают уровень шума в оценках состояния.
Низкие значения  обеспечивают более сильное сглаживание за счёт более медленной реакции на скачкообразные изменения сигнала. Увеличение значения уменьшает задержку и ухудшает сглаживание.
обеспечивают более сильное сглаживание за счёт более медленной реакции на скачкообразные изменения сигнала. Увеличение значения уменьшает задержку и ухудшает сглаживание.
Увеличение  снижает стабильность фильтра.
снижает стабильность фильтра.
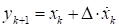
На рис. 8 показан пример использования датчика альфа-бета фильтра с и шагом 0.01 [ s ], Wx – исходный датчик.
Рис. 8 Пример использования датчика альфа-бета фильтра
Синтаксис метода создания
alphaBetaFilter(Sensor, alpha, beta, deltaT, work=...)
Обязательные позиционные параметры метода
sensor Sensor
Исходный датчик.
scalar alpha [-]
Коэффициент альфа. Константа. .
.
scalar beta [-]
Коэффициент бета. Константа. .
.
scalar deltaT [time]
Временной интервал между измерениями.
Необязательные именованные параметры метода
work = [on:/off:]
Параметр определяет состояние датчика (работает или не работает) сразу после перевода проекта из режима редактирования в режим исследования. Это состояние элемента можно менять в процессе расчёта с помощью объектов событие (event) и изменение механизма (reform). По умолчанию work=on:.
 work = on:
work = on:Сразу после перевода проекта из режима редактирования в режим исследования датчик работает, то есть считает отфильтрованное значение исходного датчика.
 work = off:
work = off:Сразу после перевода проекта из режима редактирования в режим исследования датчик не работает, то есть не имеет значения, не считает опорные точки.