4.1.48 Датчик аппроксимации полиномом
На шаге измерения исходного датчика  имеется n последовательных измерений значения исходного датчика:
имеется n последовательных измерений значения исходного датчика:  – это опорные точки, n – число опорных точек. Значение
– это опорные точки, n – число опорных точек. Значение  измерено в момент времени
измерено в момент времени
где  – номер шага измерения исходного датчика;
– номер шага измерения исходного датчика;
Строится полином  с такими коэффициентами
с такими коэффициентами  , что сумма
, что сумма
с такими коэффициентами 
Значение датчика аппроксимации полиномом в момент времени  равно:
равно:
1) при  – значению исходного датчика в начальный момент времени;
– значению исходного датчика в начальный момент времени;
2) при  – среднему значению всех измеренных к данному моменту значений исходного датчика;
– среднему значению всех измеренных к данному моменту значений исходного датчика;
3) при  и
и  –
–  , где полином
, где полином  построен на основе n измеренных значений исходного датчика
построен на основе n измеренных значений исходного датчика  .
.
В случае, когда на каком-то измерении определитель матрицы уравнения для расчёта коэффициентов полинома получается достаточно малым, чтобы выйти за пределы точности (т.е. матрица считается вырожденной), для этого измерения производится попытка рассчитать коэффициенты полинома меньшей степени. При необходимости степень понижается вплоть до нулевой, когда расчёт гарантированно можно произвести. Для следующего измерения вновь рассчитываются коэффициенты полинома заданной пользователем степени (т.е. понижение степени не сохраняется).
На рис. 9 показан пример использования датчика аппроксимации полиномом степени 2 по 64 точкам с шагом 0.01 [ s ], Wx – исходный датчик.
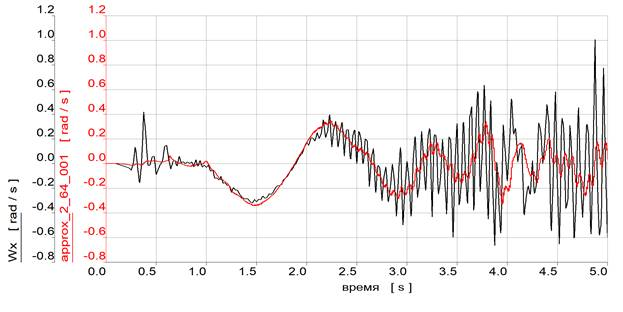
Рис. 9 Пример использования датчика аппроксимации полиномом
Синтаксис метода создания
approximation(Sensor, s, n, deltaT)
Обязательные позиционные параметры метода
sensor Sensor
Исходный датчик.
scalar s [-]
Степень аппроксимирующего полинома. Константа. Дробная часть во время расчёта отбрасывается. Предусмотрено построение полиномов 0, 1, 2, 3 и 4 степеней.
scalar n [-]
Количество опорных точек, по которым строится аппроксимирующий полином. Константа. Дробная часть во время расчёта отбрасывается.  .
.
scalar deltaT [time]
Временной интервал между измерениями.