4.3.2 Дифференциальный канал
 Данное программное движение моделирует регулирование характеристики
Данное программное движение моделирует регулирование характеристики Предполагается, что регулятор имеет собственные динамические (инерционные и демпфирующие) характеристики. На значение регулируемой характеристики  могут быть наложены ограничения:
могут быть наложены ограничения:
где  ,
,  ,
,  ,
,  – заданные значения.
– заданные значения.
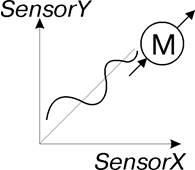
Рис. 2. Дифференциальный канал
Динамические характеристики канала регулирования описываются следующим дифференциальным уравнением с ограничениями:
где  ,
,  ,
,  – значения самой регулируемой характеристики и ее производных по времени;
– значения самой регулируемой характеристики и ее производных по времени;
Передаточная функция канала регулирования без учета ограничений на ускорение и скорость регулируемой характеристики, имеет следующий вид:
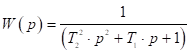 .
.Синтаксис метода создания
differential2(SensorY, SensorX, T2, T1, AYmax=…, AVmax=…, leftLimit=..., rightLimit=..., work=...)
Обязательные позиционные параметры метода
sensor SensorY
Датчик значения регулируемой характеристики.
sensor SensorX
Датчик управляющего сигнала.
scalar T2 [time]
Коэффициент при второй производной регулируемой характеристики в дифференциальном уравнении канала. В уравнении канала этот коэффициент используется во второй степени.
scalar T1 [time]
Коэффициент при первой производной регулируемой характеристики в дифференциальном уравнении канала.
Необязательные именованные параметры метода
 AYmax = scalar
AYmax = scalarОграничение на максимальное абсолютное значение ускорения регулируемой характеристики. Размерность значения ограничения должна быть равна размерности значения регулируемой характеристики деленной на время в квадрате. По умолчанию, если этот параметр не задан, предполагается, что ограничение на ускорение регулируемой характеристики отсутствует.
 VYmax = scalar
VYmax = scalarОграничение на максимальное абсолютное значение скорости регулируемой характеристики. Размерность значения ограничения должна быть равна размерности значения регулируемой характеристики деленной на время. По умолчанию, если этот параметр не задан, предполагается, что ограничение на скорость регулируемой характеристики отсутствует.
 leftLimit = scalar
leftLimit = scalarЛевое ограничение значения регулируемой характеристики – минимально возможное значение. Размерность значения ограничения должна совпадать с размерностью значения регулируемой характеристики. По умолчанию, если этот параметр не задан, предполагается, что ограничение на минимальное значение регулируемой характеристики отсутствует.
 rightLimit = scalar
rightLimit = scalarПравое ограничение значения регулируемой характеристики – максимально возможное значение. Размерность значения ограничения должна совпадать с размерностью значения регулируемой характеристики. По умолчанию, если этот параметр не задан, предполагается, что ограничение на максимальное значение регулируемой характеристики отсутствует.
Параметр является общим для всех методов создания программных.