3.3.25 Момент на совпадение направлений двух векторов
 Элемент описывает силовое взаимодействие между двумя звеньями в виде момента, направленного на совпадение направлений двух векторов. Величина упругого момента зависит от угла между векторами и достигает максимального значения при заданном угле, после чего момент уменьшается до нуля при достижении 180°. Схематический вид элемента представлен на рис. 11.
Элемент описывает силовое взаимодействие между двумя звеньями в виде момента, направленного на совпадение направлений двух векторов. Величина упругого момента зависит от угла между векторами и достигает максимального значения при заданном угле, после чего момент уменьшается до нуля при достижении 180°. Схематический вид элемента представлен на рис. 11.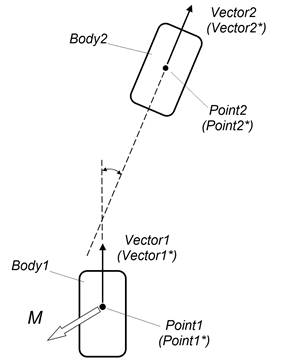
Рис. 11. Момент на совпадение направлений двух векторов
Синтаксис метода создания
moment2V(Body1, Vector1, Point1, Body2, Vector2, Point2, ME, FiE, damp, work=…, color=…, visible=…)
Обязательные позиционные параметры метода
body Body1
vector Vector1
Исходный вектор первого звена. Копия этого вектора Vector1* прикрепляется к первому звену и используется для расчета силового воздействия элемента.
point Point1
Исходная точка силового воздействия элемента на первое звено. Копия этой точки Point1* прикрепляется к первому звену.
body Body2
vector Vector2
Исходный вектор второго звена. Копия этого вектора Vector2* прикрепляется ко второму звену и используется для расчета силового воздействия элемента.
point Point2
Исходная точка силового воздействия элемента на второе звено. Копия этой точки Point2* прикрепляется ко второму звену.
scalar ME [force length]
Максимальное значение упругого момента.
scalar FiE [angle]
Значение угла, при котором реализуется максимальный упругий момент.
Необязательные именованные параметры метода
 damp = scalar [time]
damp = scalar [time]Относительный коэффициент демпфирования элемента.
Параметры являются общими для всех методов создания силовых элементов.
Описание
При переводе проекта из режима редактирования в режим исследования для элемента выполняются следующие действия.
1. Создается точка Point1*, которая прикрепляется к звену Body1 и в исходном положении механизма совпадает с точкой Point1. Точка Point1* является точкой силового воздействия элемента на звено Body1.
2. Создается точка Point2*, которая прикрепляется к звену Body2 и в исходном положении механизма совпадает с точкой Point2. Точка Point2* является точкой силового воздействия элемента на звено Body2.
3. Создается вектор Vector1*, который прикрепляется к звену Body1 и в исходном положении совпадает с вектором Vector1.
4. Создается вектор Vector2*, который прикрепляется к звену Body2 и в исходном положении совпадает с вектором Vector2.
Функция упругого момента  имеет следующий вид (см. рис. 12):
имеет следующий вид (см. рис. 12):
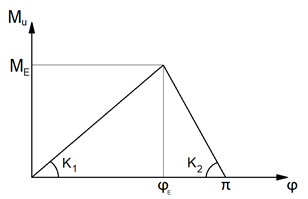
Рис. 12. Характеристика момента элемента
Момент, действующий со стороны элемента на точку Point1* первого звена равен:
где  – угол между векторами Vector1* и Vector2*;
– угол между векторами Vector1* и Vector2*;
Сила, действующая со стороны элемента на точку Point1* первого звена, равна нулю.
Силовое воздействие элемента (сила, момент) на точку Point2* второго звена определяется из условия самоуравновешенности сил, действующих со стороны элемента на точки Point1* и Point2*. Для данного элемента это означает, что на точку Point2* действуют нулевая сила и момент противоположный  .
.
Внутренние системные объекты
sensor gamma [angle]
Угол между Vector1* и Vector2*.