3.3.24 Деформируемая втулка
 Элемент представляет собой деформируемую втулку (или резинометаллический шарнир). Конструктивно элемент состоит из внутренней и внешней втулки и связывающего их упругого материала (резина или полимер), который также имеет демпфирующие свойства. Схема и конструкция элемента представлены на рис. 10.
Элемент представляет собой деформируемую втулку (или резинометаллический шарнир). Конструктивно элемент состоит из внутренней и внешней втулки и связывающего их упругого материала (резина или полимер), который также имеет демпфирующие свойства. Схема и конструкция элемента представлены на рис. 10.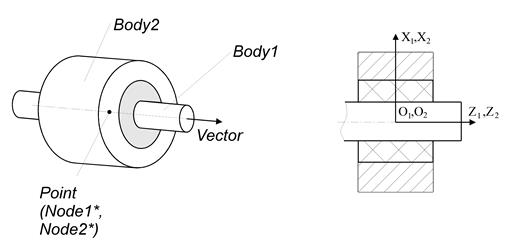
Рис. 10. Деформируемая втулка
Синтаксис метода создания
silentblock(Body1, Point, Body2, Vector, Params, VectorX=..., dX0=..., dY0=..., dZ0=..., dFiX0=..., dFiY0=..., dFiZ0=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Body1
point Point
body Body2
vector Vector
Продольная ось элемента.
template Params
Шаблон параметров деформируемой втулки.
Необязательные именованные параметры метода
 VectorX = vector
VectorX = vectorВектор, определяющий направление оси  . По умолчанию объект задается системой.
. По умолчанию объект задается системой.
 dX0 = scalar [length]
dX0 = scalar [length]Начальное смещение вдоль оси . По умолчанию dX0=0 [m].
 dY0 = scalar [length]
dY0 = scalar [length]Начальное смещение вдоль оси  . По умолчанию dY0=0 [m].
. По умолчанию dY0=0 [m].
 dZ0 = scalar [length]
dZ0 = scalar [length]Начальное смещение вдоль оси  . По умолчанию dZ0=0 [m].
. По умолчанию dZ0=0 [m].
 dFiX0 = scalar [angle]
dFiX0 = scalar [angle]Начальный угол поворота вокруг оси . По умолчанию dFiX0=0 [rad].
 dFiY0 = scalar [angle]
dFiY0 = scalar [angle]Начальный угол поворота вокруг оси . По умолчанию dFiY0=0 [rad].
 dFiZ0 = scalar [angle]
dFiZ0 = scalar [angle]Начальный угол поворота вокруг оси . По умолчанию dFiZ0=0 [rad].
Параметры являются общими для всех методов создания силовых элементов.
Описание
При переводе проекта из режима редактирования в режим исследования для элемента выполняются следующие действия.
1. Создается узел Node1*, который прикрепляется к звену Body1. Центр узла совпадает с точкой Point, а направление оси  присоединенной системы координат узла
присоединенной системы координат узла  совпадает с вектором Vector. Если задан вектор VectorX, с ним совпадает направление оси
совпадает с вектором Vector. Если задан вектор VectorX, с ним совпадает направление оси  . Узел Node1* является точкой силового воздействия элемента на звено Body1.
. Узел Node1* является точкой силового воздействия элемента на звено Body1.
2. Создается узел Node2*, который прикрепляется к звену Body2. Центр узла совпадает с точкой Point, а направление оси  присоединенной системы координат узла
присоединенной системы координат узла  совпадает с вектором Vector. Если задан вектор VectorX, с ним совпадает направление оси
совпадает с вектором Vector. Если задан вектор VectorX, с ним совпадает направление оси  . Узел Node2* является точкой силового воздействия элемента на звено Body2.
. Узел Node2* является точкой силового воздействия элемента на звено Body2.
3. Если заданы начальные смещения dX0, dY0, dZ0, dFiX0, dFiY0, dFiZ0, определяются начальные силовые воздействия  ,
,  ,
,  ,
,  .
.
Из данных проекта о взаимном положении и относительной скорости тел для элемента по параметрам, взятым из шаблона Params, по алгоритму, определенному в шаблоне, вычисляются усилия, действующие на звенья Body1 и Body2.
Внутренние системные объекты
sensor X [length], sensor Y [length], sensor Z [length]
sensor dR [length]
Радиальное смещение – проекция вектора  на перпендикулярную плоскость.
на перпендикулярную плоскость.
sensor fiX [angle], sensor fiY [angle], sensor fiZ [angle]
Приведенные параметры Эйлера, определяющие поворот узла второго звена элемента относительно узла первого элемента.
sensor Alfa [angle]
Угол перекоса – угол между векторами и .
sensor fiZA [angle]