3.3.23 Вращательное трение
 Данный элемент предназначен для моделирования трения, возникающего при относительном вращательном перемещении звеньев Body1 и Body2 вокруг вектора Vector. Момент трения направлен вдоль вектора Vector*, прикрепленного к звену Body2. Схематический вид элемента представлен на рис. 9.
Данный элемент предназначен для моделирования трения, возникающего при относительном вращательном перемещении звеньев Body1 и Body2 вокруг вектора Vector. Момент трения направлен вдоль вектора Vector*, прикрепленного к звену Body2. Схематический вид элемента представлен на рис. 9.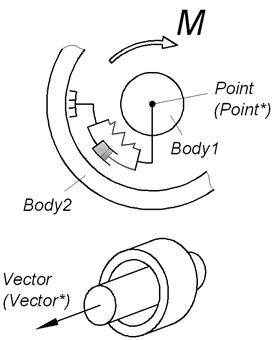
Рис. 9. Вращательное трение с упругой деформацией
Синтаксис метода создания
rotFrict(Body1, Point, Body2, Vector, M_sliding, k, b, k_r=…, g0=…, work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Body1
point Point
Исходная точка силового воздействия элемента на первое звено. Копия этой точки Point* прикрепляется к первому звену и используется для расчета силового воздействия элемента.
body Body2
vector Vector
Вектор действия момента трения. Его копия Vector* прикрепляется ко второму звену и используется для задания направления момента трения.
sensor M_sliding [force length]
Момент трения скольжения.
scalar k [force length/angle]
Угловая жесткость упругой деформации в контакте.
scalar b [force length/angle]
Угловое демпфирование упругой деформации в контакте.
Необязательные именованные параметры метода
 k_r = scalar [-]
k_r = scalar [-]Относительный коэффициент трения покоя в контакте. По умолчанию k_r = 1.3.
 g0 = scalar [angle]
g0 = scalar [angle]Предельное значение угловой деформации. По умолчанию параметр имеет значение равное бесконечности.
Параметры являются общими для всех методов создания силовых элементов.
Описание
При переводе проекта из режима редактирования в режим исследования для элемента выполняются следующие действия.
1. Создается точка Point*, которая прикрепляется к звену Body1 и в момент создания совпадает с точкой Point. Точка Point* является точкой силового воздействия элемента на звено Body1.
2. Создается вектор Vector*, который прикрепляется к звену Body2 и в исходном положении механизма совпадает с вектором Vector. Вектор Vector* в процессе расчета определяет направление момента трения.
Значение момента, действующего в текущий момент времени на звено Body1 в направлении вектора Vector*, вычисляется как сумма упругой и демпфирующей составляющих, которая ограничена моментом трения скольжения, если мы находимся в скольжении, или моментом трения покоя в противном случае:
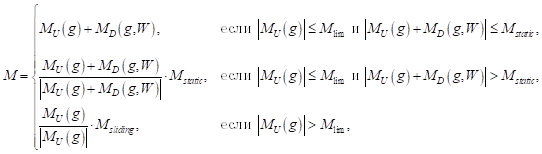
где  – момент трения скольжения;
– момент трения скольжения;
Предельная сила определяется по предыдущему шагу:
Упругая и демпфирующая составляющие момента трения определяются по формулам:
где  – определяемое пользователем предельное значение угловой деформации. В пределе
– определяемое пользователем предельное значение угловой деформации. В пределе  момент
момент  .
.
Если в результате выполнения шага интегрирования выполняется условие  , то считается, что произошло страгивание углового положения сцепления. Новое значение углового положения сцепления определяется следующим образом
, то считается, что произошло страгивание углового положения сцепления. Новое значение углового положения сцепления определяется следующим образом
 ,
,где  – предварительное значение угловой деформации (до страгивания),
– предварительное значение угловой деформации (до страгивания),
определяемое из условия  ,
,