7.8 Общее описание модели колеса «шина-EULER-M1»
В данной расчетной модели колеса шина представляет собой механическую систему, включающую жесткое безмассовое кольцо брекера, упруго связанное с ободом колеса и взаимодействующее с опорной поверхностью. Структурная схема взаимодействия модели колеса «шина-EULER-M1» с опорной поверхностью приведена на рис. 1.
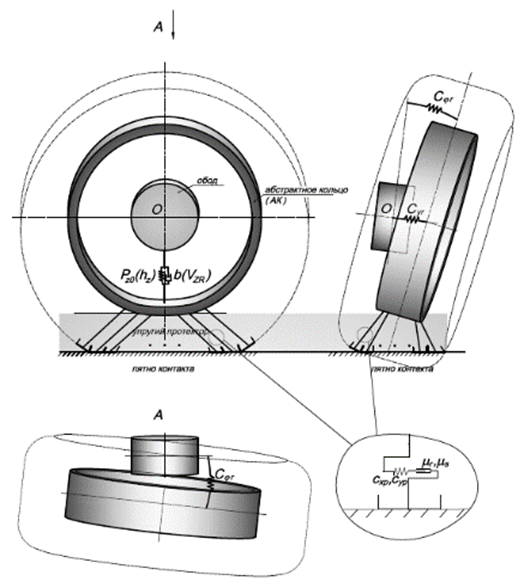
Рис. 1. Структурная схема взаимодействия модели колеса «шина-EULER-M1»
с опорной поверхностью
В данной модели колеса, в отличие от модели «шина-EULER-M3», звено кольца брекера безмассовое. Кольцо обладает одной степенью свободы: оно может поворачиваться вокруг оси перпендикулярной плоскости контакта колеса и опорной поверхности.
Шина равномерно разбивается на дискретные элементы по ширине и окружности шины. Эти элементы можно интерпретировать как ворсинки «щетки». В модели принято, что элементы обладают упругими свойствами во всех направлениях и могут деформироваться независимо от соседних элементов. Внешняя сторона элементов шины (протектор) сцепляется с опорной поверхностью силами трения. Силы, действующие на элементы со стороны опорной поверхности, передаются на кольцо.
Для расчета сил трения в контакте колеса с опорной поверхностью, она заменяется эквивалентной плоскостью, представляющей собой опорную плоскость, создающую такие же статические реакции, что и исходная опорная поверхность. При расчете контактного взаимодействия колеса с опорной поверхностью используется гипотеза квазистационарности качения колеса.
Схема функционирования модели показана на рис. 2.
В качестве входных данных для модели используются следующие параметры:
− положение центра обода в неподвижной системе координат
(радиус-вектор  );
);
− угловая ориентации обода в неподвижной системе координат (вектор параметров углового положения  );
);
− линейная  и угловая
и угловая  скорости обода в неподвижной системе координат;
скорости обода в неподвижной системе координат;
− форма опорной поверхности, которая включает параметры положения и скорости элементарных площадок опорной поверхности в неподвижной системе координат, а также формы контактных поверхностей этих площадок;
− фрикционные свойства опорной поверхности;
− геометрические, упругие и диссипативные параметры шины.
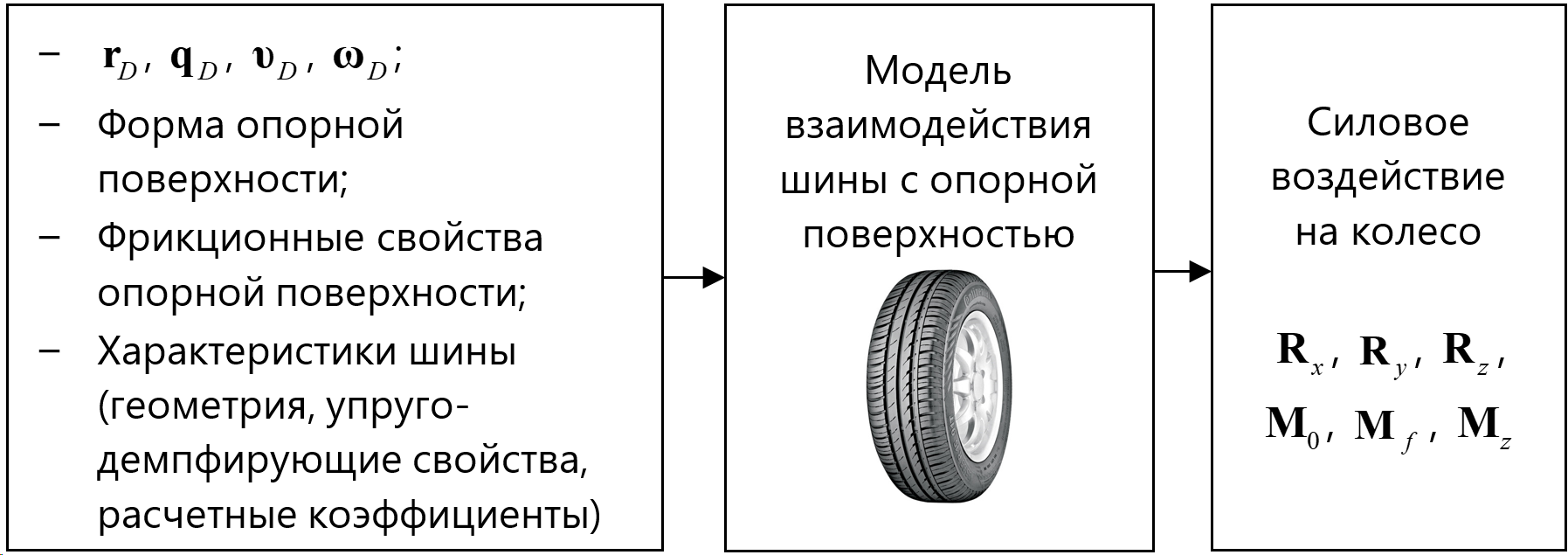
Рис. 2. Схема функционирования модели взаимодействия
шины с опорной поверхностью
В модели рассчитываются следующие силовые факторы, действующие на шину со стороны опорной поверхности:
−  – вектор статической реакции опорной поверхности с учетом демпфирования;
– вектор статической реакции опорной поверхности с учетом демпфирования;
−  – вектор статического момента реакции опорной поверхности относительно центра обода;
– вектор статического момента реакции опорной поверхности относительно центра обода;
−  – вектор момента сопротивления качению;
– вектор момента сопротивления качению;
−  – вектор продольной реакции эквивалентной плоскости;
– вектор продольной реакции эквивалентной плоскости;
−  – вектор боковой реакции эквивалентной плоскости;
– вектор боковой реакции эквивалентной плоскости;
−  – вектор стабилизирующего момента эквивалентной плоскости относительно центра пятна контакта.
– вектор стабилизирующего момента эквивалентной плоскости относительно центра пятна контакта.
В модели также рассчитываются силы, действующие на опорную поверхность. Если элементарные площадки опорной поверхности принадлежат разным звеньям механической системы, то итоговые силовые факторы распределяются по всем звеньям дороги, находящимся в контакте с шиной.
На рис. 3 приведена блок-схема расчета взаимодействия шины с опорной поверхностью.
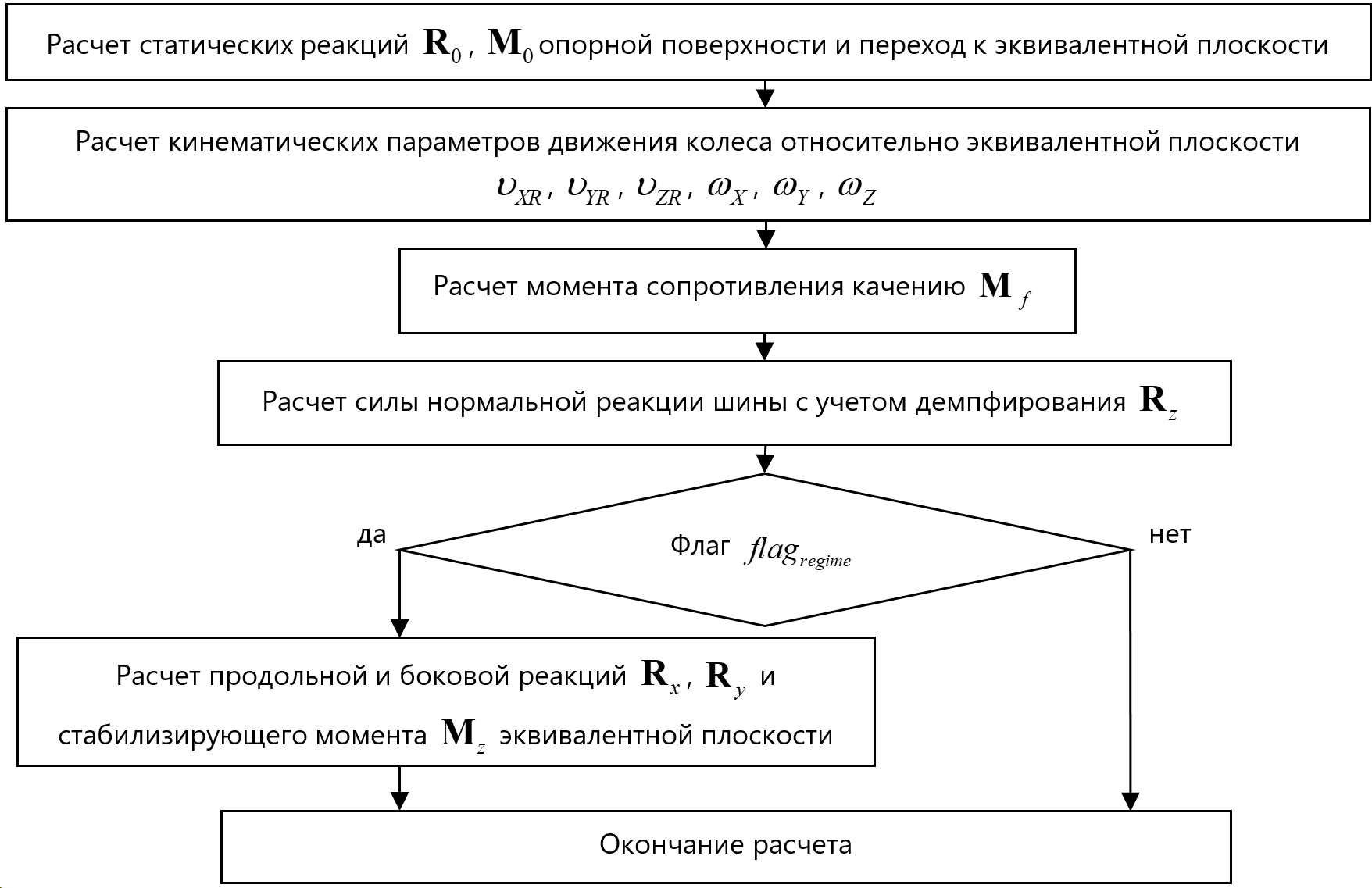
Рис. 3. Последовательность расчета взаимодействия шины с опорной поверхностью