7.10 Общее описание модели колеса «шина-EULER-M3»
Данная расчетная модель колеса включает жесткий обод колеса, жесткое массивное кольцо брекера и щеточную модель протектора, контактирующего с опорной поверхностью. Обод колеса и кольцо брекера связаны упругими элементами. Кольцо брекера обладает всеми шестью степенями свободы относительно обода: оно может перемещаться и поворачиваться относительно обода колеса вдоль оси симметрии колеса, а также перемещаться и поворачиваться относительно двух взаимоперпендикулярных осей, лежащих в центральной плоскости вращения колеса. Шина равномерно разбивается на дискретные элементы по ширине и окружности шины. Эти элементы можно интерпретировать как ворсинки «щетки». Элементы обладают упругими свойствами в тангенциальном и нормальном направлениях по отношению к опорной поверхности. Каждый элемент деформируется независимо от соседних элементов. Внешняя сторона элементов (протектор) сцепляется с опорной поверхностью силами трения. Силы, действующие на элементы со стороны опорной поверхности, передаются на кольцо брекера. При расчете контактного взаимодействия колеса с опорной поверхностью производится отслеживание истории контактных взаимодействий элементов протектора с опорной поверхностью. Структурная схема взаимодействия модели колеса «шина-EULER-M3» с опорной поверхностью представлена на рис. 19. Схема функционирования модели показана на рис. 20.
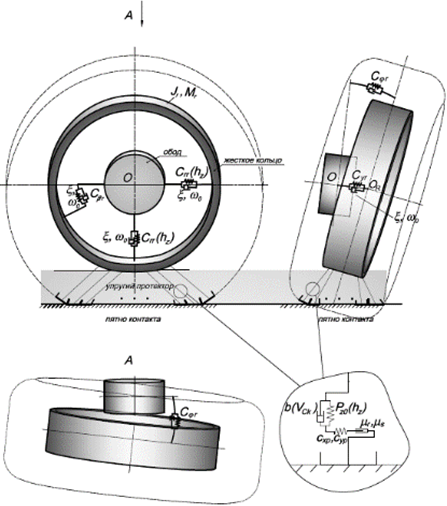
Рис. 19. Структурная схема взаимодействия
модели колеса «шина-EULER-M3» с опорной поверхностью
В качестве входных данных для модели используются следующие параметры:
− положение центров колеса и кольца в неподвижной системе координат (радиус-векторы  и
и  );
);
− угловые ориентации обода и кольца в неподвижной системе координат (векторы параметров углового положения  и
и  );
);
− линейные  ,
,  и угловые
и угловые  ,
,  скорости обода и кольца в неподвижной системе координат;
скорости обода и кольца в неподвижной системе координат;
− текущее время  ;
;
− матрица  координат контактных точек (центров внешних поверхностей) элементов протектора в предыдущей точке расчета (
координат контактных точек (центров внешних поверхностей) элементов протектора в предыдущей точке расчета ( ) в системе координат опорной поверхности;
) в системе координат опорной поверхности;
− вектор  состояний контактных точек элементов протектора в предыдущей точке расчета, характеризующих наличие проскальзывания на предыдущем шаге;
состояний контактных точек элементов протектора в предыдущей точке расчета, характеризующих наличие проскальзывания на предыдущем шаге;
− форма опорной поверхности, которая включает параметры положения и скорости элементарных площадок опорной поверхности в неподвижной системе координат, а также формы контактных поверхностей этих площадок;
− фрикционные свойства опорной поверхности;
− геометрические, инерционные, упругие и диссипативные параметры шины.
В модели также рассчитываются силы, действующие на опорную поверхность. При использовании данной модели требуется, чтобы все элементарные площадки опорной поверхности принадлежали одному звену.
На рис. 21 приводится схема расчета взаимодействия шины с опорной поверхностью.

Рис. 20. Схема функционирования модели взаимодействия шины с опорной поверхностью
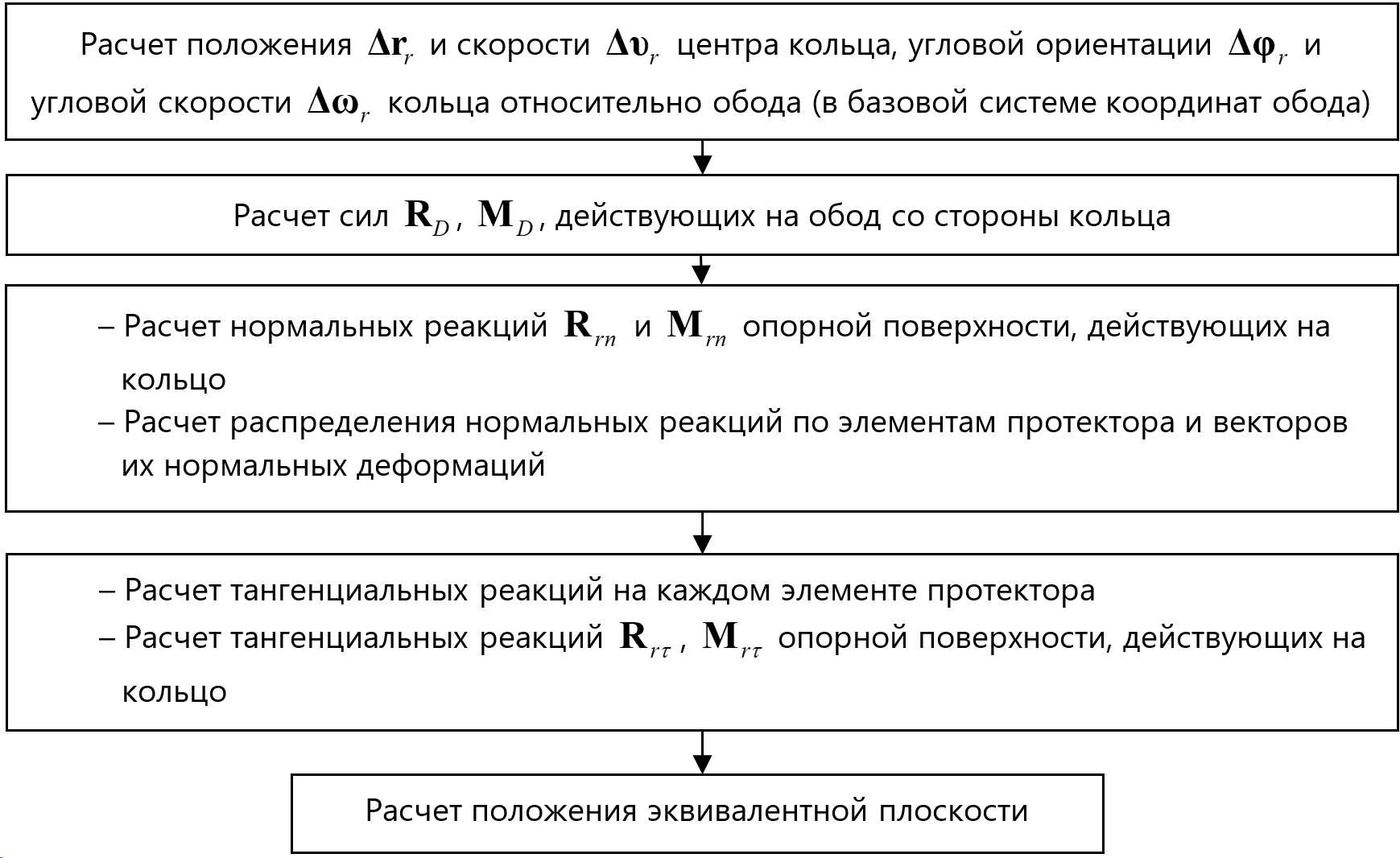
Рис. 21. Схема расчета взаимодействия шины с опорной поверхностью