4.1 Осесимметричная аэродинамическая сила
 Данный силовой элемент используется для задания аэродинамических сил, действующих на звено с осесимметричной внешней формой, при внешнем обтекании этого звена сплошной средой. На звене задается базовая точка задания аэродинамических коэффициентов Point и вектор VectorX. Точка Point расположена на оси симметрии внешней формы звена. Вектор VectorX задает направление оси симметрии внешней формы звена. Для расчетов создаются копии этих объектов Point* и VectorX*, которые прикрепляются к звену. Схематический вид силового элемента представлен на рис. 1.
Данный силовой элемент используется для задания аэродинамических сил, действующих на звено с осесимметричной внешней формой, при внешнем обтекании этого звена сплошной средой. На звене задается базовая точка задания аэродинамических коэффициентов Point и вектор VectorX. Точка Point расположена на оси симметрии внешней формы звена. Вектор VectorX задает направление оси симметрии внешней формы звена. Для расчетов создаются копии этих объектов Point* и VectorX*, которые прикрепляются к звену. Схематический вид силового элемента представлен на рис. 1.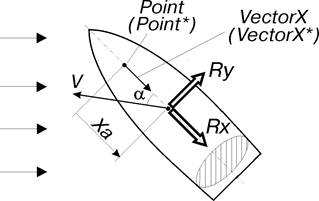
Рис. 1. Осесимметричная аэродинамическая сила
Продольная аэродинамическая сила Rx направлена вдоль оси симметрии внешней формы звена. Боковая аэродинамическая сила Ry действует в плоскости, образуемой осью симметрии внешней формы звена и вектором скорости звена относительно среды. Значения продольной и боковой аэродинамических сил определяются на основании характеристик среды и заданных коэффициентов аэродинамических сил. Точка приложения продольной и боковой аэродинамических сил называется центром аэродинамического давления, он находится на оси симметрии внешней формы звена. Смещение центра аэродинамического давления Xa относительно базовой точки Point* определяется заданной функцией.
В силовом элементе определена точка взаимодействия звена со средой. В этой точке определяются параметры набегающего потока, визуализируются сам силовой элемент и векторы его аэродинамических сил и моментов. По умолчанию, если не задан ключевой параметр pointFlow, точка взаимодействия звена со средой совпадает с точкой Point*.
Коэффициенты аэродинамических сил задаются в виде функций, зависящих от угла атаки  и числа
и числа  движения. Угол атаки может изменяться в интервале от 0 до 180°. В силовом элементе используются коэффициенты аэродинамических сил в системе координат, связанной со звеном. Если в распоряжении пользователя имеются функции аэродинамических коэффициентов (например, в виде таблиц) в скоростной системе координат, то средствами EULER можно пересчитать их в связанную систему координат. Пример функций пересчета аэродинамических коэффициентов приведен ниже в описании силового элемента.
движения. Угол атаки может изменяться в интервале от 0 до 180°. В силовом элементе используются коэффициенты аэродинамических сил в системе координат, связанной со звеном. Если в распоряжении пользователя имеются функции аэродинамических коэффициентов (например, в виде таблиц) в скоростной системе координат, то средствами EULER можно пересчитать их в связанную систему координат. Пример функций пересчета аэродинамических коэффициентов приведен ниже в описании силового элемента.
Пользователь может задать датчики, от значений которых зависят функции аэродинамических коэффициентов в дополнение к зависимости от угла атаки и числа движения. Это может потребоваться, например, при моделировании выхода ракеты из контейнера. В таком случае аэродинамические коэффициенты ракеты или ее частей зависят от дистанции выхода – расстояния между носиком ракеты и срезом контейнера.
Синтаксис метода создания
aerodynamics1(Flow, Body, Point, VectorX, Sa, fCx, fCy, fXa, list(Sensor1, ...), pointFlow=…, work=..., color=..., visible=...)
Обязательные позиционные параметры метода
medium Flow
Среда, которая воздействует на звено.
body Body
point Point
Исходная базовая точка задания аэродинамических коэффициентов. Копия этой точки Point* прикрепляется к звену и используется при расчете аэродинамических сил. Предполагается, что точка расположена на оси симметрии внешней формы звена.
vector VectorX
VectorX* прикрепляется к звену и используется при расчете аэродинамических сил.
scalar Sa [length2]
Аэродинамическая площадь, относительно которой определены коэффициенты аэродинамических сил.
function fCx [-]<[angle], [-], ...>
Функция коэффициента продольной аэродинамической силы, направленной вдоль оси симметрии внешней формы звена (VectorX*). Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fCy [-]<[angle], [-], ...>
Функция коэффициента боковой аэродинамической силы, направленной перпендикулярно оси симметрии внешней формы звена (перпендикулярно вектору VectorX*). Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fXa [length]<[angle], [-], ...>
Функция смещения центра аэродинамического давления относительно базовой точки Point* в направлении вектора VectorX*. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
list(sensor Sensor1, ...),
Список датчиков, от значений которых зависят функции fCx, fCy и fXa в дополнение к зависимости от угла атаки и числа движения.
Необязательные именованные параметры метода
 pointFlow = point
pointFlow = pointТочка взаимодействия звена со средой. Копия этой точки pointFlow* прикрепляется к звену. В точке pointFlow* определяются параметры набегающего потока, визуализируются сам силовой элемент и векторы его аэродинамических сил и моментов.
По умолчанию, если параметр pointFlow не задан, точка взаимодействия звена со средой совпадает с точкой Point*.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты» книги «Описание объектов многокомпонентной механической системы».
Внутренние системные объекты
sensor alfa [angle]
Угол атаки – угол между осью симметрии внешней формы звена и вектором скорости звена относительно среды в точке взаимодействия звена со средой.
sensor velocity [length/time]
Скорость звена относительно среды в точке взаимодействия звена со средой.
sensor Mach [-]
Описание
При расчете силового элемента в каждый момент времени определяются следующие параметры взаимодействия звена со средой:
Все параметры взаимодействия звена со средой определяются в точке pointFlow*, если она задана. Иначе, в точке Point*.
Центр аэродинамического давления определяется смещением от базовой точки Point* по направлению VectorX*
где  – заданная функция смещения центра аэродинамического давления;
– заданная функция смещения центра аэродинамического давления;
Коэффициент продольной аэродинамической силы
где  – заданная функция коэффициента продольной аэродинамической силы.
– заданная функция коэффициента продольной аэродинамической силы.
Коэффициент боковой аэродинамической силы
где  – заданная функция коэффициента боковой аэродинамической силы.
– заданная функция коэффициента боковой аэродинамической силы.
Число аргументов в функциях
|
Продольная и боковая аэродинамические силы приложены в центре аэродинамического давления.
Значение продольной аэродинамической силы равно
где  – скоростной напор набегающего потока;
– скоростной напор набегающего потока;
Значение боковой аэродинамической силы равно
Сила  перпендикулярна вектору VectorX*. Она направлена в сторону, противоположную вектору скорости звена относительно среды.
перпендикулярна вектору VectorX*. Она направлена в сторону, противоположную вектору скорости звена относительно среды.
Момент, действующий со стороны силового элемента в центре аэродинамического давления, равен нулю.
В силовом элементе используются коэффициенты аэродинамических сил в системе координат, связанной со звеном. Если в распоряжении пользователя имеются функции аэродинамических коэффициентов в скоростной системе координат, то они могут быть пересчитаны с помощью EULER, например, как это сделано в следующем примере.
Пример пересчета аэродинамических коэффициентов
// CxV(a, M), CyV(a, M) – функции аэродинамических коэффициентов
// в скоростной системе координат
function Cx(a [rad], M []) = CxV(#a, #M)*cos(#a)-CyV(#a, #M)*sin(#a);
function Cy(a [rad], M []) = CxV(#a, #M)*sin(#a)+CyV(#a, #M)*cos(#a);
// Cx(a, M), Cy(a, M) – функции аэродинамических коэффициентов
// в системе координат, связанной со звеном
|