2.2 Силовое взаимодействие поверхность-поверхность
 Элемент описывает контактное взаимодействие между двумя поверхностями. Поверхности являются ориентируемыми. Нормаль поверхности в каждой ее точке направлена наружу. Силовое взаимодействие определяется в предположении, что поверхности являются наружными поверхностями некоторых тел (звеньев). Материал тела расположен с внутренней стороны поверхности. Силовое взаимодействие возникает при проникновении одной поверхности внутрь другой. То есть, если часть материала одного тела, ограниченного соответствующей поверхностью, находится в материале другого тела, ограниченного второй поверхностью.
Элемент описывает контактное взаимодействие между двумя поверхностями. Поверхности являются ориентируемыми. Нормаль поверхности в каждой ее точке направлена наружу. Силовое взаимодействие определяется в предположении, что поверхности являются наружными поверхностями некоторых тел (звеньев). Материал тела расположен с внутренней стороны поверхности. Силовое взаимодействие возникает при проникновении одной поверхности внутрь другой. То есть, если часть материала одного тела, ограниченного соответствующей поверхностью, находится в материале другого тела, ограниченного второй поверхностью.Силовое взаимодействие происходит только изображаемых частей поверхностей. Обе поверхности обязательно должны быть прикреплены к звеньям механической системы.
Областью контакта считается пространственное тело, образованное пересечением двух поверхностей. В области контакта определяется поверхность контакта. Поверхность контакта разбивается на элементарные участки.
Сила, действующая со стороны силового элемента на тело, которому принадлежит первая поверхность, определяется как результирующая сил взаимодействия элементарных участков поверхности контакта. На каждый элементарный участок со стороны силового элемента действуют следующие силы:
− Сила упругой нормальной реакции.
− Сила нормального демпфирования, вектор силы коллинеарен вектору силы упругой нормальной реакции.
− Сила трения, которая возникает при движении одной поверхности относительно другой. Сила направлена перпендикулярно вектору силы упругой нормальной реакции.
На тело, которому принадлежит вторая поверхность, действуют силы, противоположные по направлению и равные по абсолютной величине.
В данной версии программного комплекса реализованы виды контактного взаимодействия типа «сфера-сфера» и «сфера-плоскость». Поэтому поверхности, заданные в качестве параметров силового элемента, должны иметь тип plane или метод создания sphere (объект типа solid). При этом обе контактируемые поверхности не должны иметь тип plane. Обратите внимание, при погружении сферы более чем на радиус в другую поверхность силовой элемент выдает нулевую силу как при отсутствии контакта!
Схематический вид элемента представлен на рис. 9.
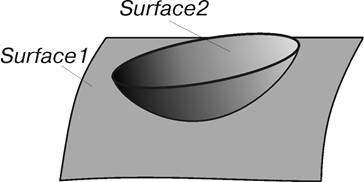
Рис. 9. Силовое взаимодействие поверхность-поверхность
Синтаксис метода создания
сontactSS (Surface1, Surface2, C_F1, C_F2, K_fr=…, F_fr=…, C_r=…, F_d=…, work=..., color=..., visible=...)
Позиционные обязательные параметры метода
surface Surface1
Первая поверхность контактного взаимодействия.
surface Surface2
Вторая поверхность контактного взаимодействия.
 C_F1 = scalar [force / length3]
C_F1 = scalar [force / length3]Параметр, определяющий относительную контактную жесткость первой поверхности (к единице площади поверхности).
 C_F2 = scalar [force / length3]
C_F2 = scalar [force / length3]Параметр, определяющий относительную контактную жесткость второй поверхности (к единице площади поверхности).
Именованные необязательные параметры метода
 K_fr = scalar [-]
K_fr = scalar [-]Коэффициент силы трения, действующей в контакте при относительном движении поверхностей Surface1 и Surface2 вдоль поверхности контакта.
По умолчанию K_fr = 0 [-].
 F_fr = function [force]<[force], [length / time]>
F_fr = function [force]<[force], [length / time]>Функция силы трения, действующей в контакте при относительном движении поверхностей Surface1 и Surface2 вдоль поверхности контакта. Функция зависит от двух аргументов – полной силы нормальной реакции в контакте и скорости движения поверхности Surface1 относительно поверхности Surface2 вдоль поверхности контакта. При значении второго аргумента 0[m/s], значение функции должно быть равным 0[N].
Параметры K_fr и F_fr несовместны, поэтому их одновременное задание недопустимо. В случае, если ни один из этих параметров не задан пользователем, используется значение K_fr принятое по умолчанию.
 C_r = scalar [-]
C_r = scalar [-]Коэффициент восстановления скорости. Характеризует упругопластические свойства контактного взаимодействия. Коэффициент равен 0 [-] при чисто пластическом взаимодействии поверхностей и равен 1 [-] при чисто упругом взаимодействии. Для промежуточного случая его значение находится в пределах 0 [-] < C_r < 1 [-]. По умолчанию C_r= 1 [-], что соответствует чисто упругому взаимодействию.
 F_d = function [-]<[length / time]>
F_d = function [-]<[length / time]>Функция относительной силы нормального демпфирования. Сила нормального демпфирования используется для задания упругопластических свойств контактного взаимодействия. Аргументом функции является составляющая скорости по вектору местной нормали поверхности контакта. При значении аргумента 0[m/s], значение функции должно быть равным 0[-].
Параметры C_r и F_d несовместны, поэтому их одновременное задание недопустимо. В случае, если ни один из этих параметров не задан пользователем, используется значение C_r принятое по умолчанию.
work =..., color =..., visible =...
Параметры являются общими для всех методов создания силовых элементов и описаны в общей части главы «Силовые элементы».
Описание
В силовом элементе принята следующая расчетная схема контактного взаимодействия. В области контакта определяется поверхность контакта. Поверхность контакта разбивается на элементарные участки. Каждый элементарный участок поверхности контакта приближенно заменяется плоской областью – фасетом. Силы, действующие со стороны силового элемента на звенья, с которыми связаны взаимодействующие поверхности Surface1 и Surface2, определяются как результирующие сил, действующих со стороны силового элемента на все фасеты контакта.
Для вычисления сил, действующих в контакте для каждого фасета определяются следующие параметры.
Center – центр фасета контакта.
В данной точке прикладываются силы элемента, действующие на фасет.
Normal – нормаль фасета.
Расчетная схема силового элемента представлена на рис. 10. Вектор силы, действующей на фасет A в точке Center, равен сумме трех составляющих:
где  – вектор силы упругой нормальной реакции;
– вектор силы упругой нормальной реакции;
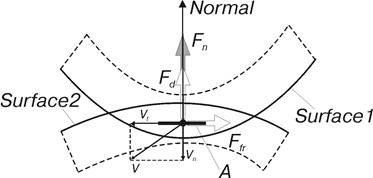
Рис. 10. Расчетная схема силового элемента
Сила упругой нормальной реакции направлена по вектору Normal. Эта сила равна:
где A – фасет контакта;
 – приведенной коэффициент контактной жесткости;
– приведенной коэффициент контактной жесткости;Контактное взаимодействие рассматривается как соударение двух звеньев. С одним из звеньев связана поверхность Surface1, с другим – поверхость Surface2. Соударение состоит из двух фаз: фазы сжатия ( , происходит сжатие материала в области контакта, деформация контакта увеличивается) и фазы восстановления (
, происходит сжатие материала в области контакта, деформация контакта увеличивается) и фазы восстановления ( , деформированный в области контакта материал восстанавливает свое исходное состояние, деформация контакта уменьшается).
, деформированный в области контакта материал восстанавливает свое исходное состояние, деформация контакта уменьшается).
Во время фазы сжатия кинетическая энергия взаимодействующих звеньев переходит в потенциальную энергию силы упругой нормальной реакции. Во время фазы восстановления кинетическая энергия частично восстанавливается. Неполное восстановление кинетической энергии в результате остаточных деформаций и нагревания определяется в данной модели контактного взаимодействия действием силы нормального демпфирования.
Если задан коэффициент восстановления скорости  , то
, то
Если задана функция относительной силы нормального демпфирования  , то
, то
Определение функции  и примеры задания функции приведены в разделе «Силовое взаимодействие точка-поверхность».
и примеры задания функции приведены в разделе «Силовое взаимодействие точка-поверхность».
Направление вектора силы трения противоположно вектору  . Если задан коэффициент трения
. Если задан коэффициент трения  , то
, то
где  – значение полной силы нормальной реакции в контакте,
– значение полной силы нормальной реакции в контакте,  ,
,  .
.
Если задана функция силы трения  , то
, то
Определение функции  и примеры задания функции приведены в разделе «Силовое взаимодействие точка-поверхность».
и примеры задания функции приведены в разделе «Силовое взаимодействие точка-поверхность».