3.1 Элементы описания механической системы
К элементам описания ММС относятся объекты, команды исследования и вспомогательные элементы. Примерами вспомогательных элементов служат операторы прикрепления объектов к звеньям и операторы определения размерностей физических величин.
Объекты определяют устройство механической системы и среду ее функционирования. Полное описание всех объектов содержится в книге «Описание объектов многокомпонентной механической системы». В данном разделе приводятся краткие характеристики важнейших типов объектов, которые необходимы для понимания принципов работы EULER.
Звено представляет собой элементарную часть структуры механической системы. Модель любой механической системы в EULER – это, прежде всего, совокупность звеньев, которые могут быть жесткими и/или деформируемыми. Жесткие звенья моделируют твердые тела в составе механической системы. Деформируемые звенья моделируют упругие тела и деформируемые конструкции в составе ММС на основе моделей, построенных методом конечных элементов (МКЭ). На рис.2 показан пример механической системы состоящей из четырех жестких звеньев.
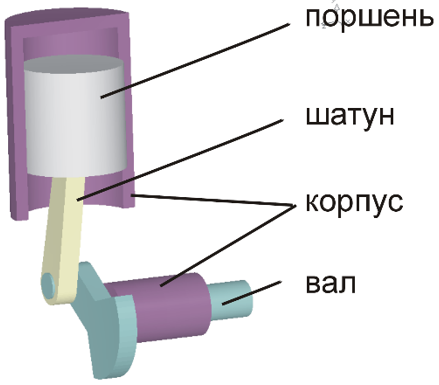
Рис. 2. Пример звеньев механической системы
Для жестких звеньев в EULER действуют следующие правила.
− В момент создания жесткое звено представляет собой абстрактный объект, обладающий лишь некоторыми общими свойствами. Для этого объекта определены цвет, видимость и наличие собственной системы координат. Жесткое звено не имеет никаких ограничений в размерах.
− К жесткому звену могут прикрепляться массово-инерционные объекты и геометрические объекты (точки, линии, тела и т.д.). В результате жесткое звено приобретает зрительное воплощение и собственные массово-инерционные характеристики. При движении механической системы объекты, прикрепленные к жесткому звену, связываются с собственной системой координат этого звена.
− Для деформируемых звеньев в EULER действуют свои правила.
− Деформируемое звено создается на основе модели упругого тела, построенной методом конечных элементов в соответствующем программном комплексе (например, MSC.NASTRAN). В КЭ-модели описывается присоединенная система координат упругого тела и выделяются интерфейсные (граничные) узлы.
− Для интерфейсных узлов деформируемого звена создается массив жестких звеньев, которые могут использоваться при создании шарниров, силовых элементов и других объектов ММС.
− Деформируемые звенья в EULER визуализируется изображением сетки разбиения КЭ-модели упругого тела.
− Геометрические и массово-инерционные объекты к деформируемым звеньям не прикрепляются. Массово-инерционные характеристики деформируемых звеньев вычисляются на основе данных, содержащихся в КЭ-модели упругого тела.
Жесткие звенья и интерфейсные узлы деформируемых звеньев могут соединяться между собой шарнирами и силовыми элементами при создании модели ММС.
Ниже, в описании объектов ММС, термин звено может использоваться в двух значениях:
1. Звено (жесткое или деформируемое) как часть механической системы.
2. Звено как интерфейсный объект, который используется при создании шарниров, силовых элементов, датчиков и других объектов ММС.
В случае жесткого звена значения терминов совпадают, т.е. жесткое звено является интерфейсным объектом ММС.
Деформируемое звено не является интерфейсным объектом, но оно содержит массив жестких звеньев – интерфейсных узлов, которые являются интерфейсными объектами данного звена при создании шарниров, силовых элементов, датчиков и т.д.
Как правило, значение термина звено понятно из контекста:
Шарнир, или кинематическая связь, представляет собой подвижное соединение звеньев. Предполагается, что шарнир вносит только ограничения на относительное движение соединяемых звеньев. При этом сам шарнир не обладает массово-инерционными характеристиками.
Силовые элементы используются для описания различных сил, действующих на звенья механической системы. К ним относятся силы упругости пружин, демпфирующие силы амортизаторов, движущие силы и силы сопротивления движению, силы воздействия внешней среды на звенья механической системы.
Скаляр характеризуется численным значением и единицей измерения. Численное значение скаляра представляется в виде вещественного числа с двойной точностью.
Объект типа функция описывает функциональную зависимость. Функции могут иметь различное количество независимых переменных (аргументов). Значения функции и ее аргументов представляются в виде вещественных чисел с двойной точностью.
Объект типа точка представляет собой геометрическую точку в пространстве.
Объект типа вектор представляет собой нормализованный вектор в пространстве. Длина нормализованного вектора равна единице.
Узел представляет собой ориентированную точку в пространстве. Ориентация узла представляется в виде правой тройки единичных взаимно перпендикулярных векторов.
Объект типа тело представляет собой геометрическое тело с заданной массой или плотностью. Тела используются для моделирования отдельных жестких звеньев или частей жестких звеньев, имеющих массово-инерционные характеристики. Иногда тела применяются просто для придания объектам ММС реального внешнего вида.
Объекты типа датчик используются для получения численной информации о значениях различных параметров в процессе функционирования механической системы.
Программные движения используются для формирования каналов управления механической системой, работающих в процессе ее движения.
Объекты типа изменение механизма используются для задания структурных изменений в механической системе. К таким изменениям относятся включение-выключение программных движений и силовых элементов, удаление или фиксирование шарниров и т.д.
Объекты типа событие используются для внесения изменений в механическую систему в процессе ее динамического движения.
Объекты типа условие состояния механизма служат для задания необходимого положения, скорости и состояния объектов. Эти характеристики определяются в начальный момент движения механической системы или в процессе проведения ее исследования.
Команды исследования описывают возможные действия, выполняемые при анализе работы механической системы. Примеры команд исследования: