4.1.38 Проекция перегрузки точки звена на вектор
 Значением датчика является проекция вектора перегрузки заданной точки звена на заданный вектор (коэффициент осевой перегрузки). Коэффициент осевой перегрузки показывает, во сколько раз кажущийся вес звена в проекции на заданную ось больше веса этого звена у поверхности Земли.
Значением датчика является проекция вектора перегрузки заданной точки звена на заданный вектор (коэффициент осевой перегрузки). Коэффициент осевой перегрузки показывает, во сколько раз кажущийся вес звена в проекции на заданную ось больше веса этого звена у поверхности Земли.Размерность значения датчика - [-].
Датчик не является дифференцируемым по параметрам положения механизма.
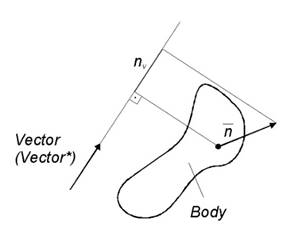
Рис. 1. Проекция перегрузки точки звена на вектор
Синтаксис метода создания
loadFactor(Body, Vector, Point, fixingVector=...)
Обязательные позиционные параметры метода
body Body
vector Vector
point Point
Необязательные именованные параметры метода
fixingVector = [lockVector:/unlockVector:]
Параметр определяет, какой из векторов используется для проекции. Им может быть исходный вектор или вектор, который создается по исходному вектору и прикрепляется к звену, определяемому по необязательному именованному параметру bodyFixVector. Положение исходного вектора относительно первого и второго звена может изменяться в процессе движения механизма. По умолчанию fixingVector = lockVector:.
 fixingVector = lockVector:
fixingVector = lockVector:Для проекции используется вектор, который создается по исходному вектору и прикрепляется к звену, определяемому по необязательному именованному параметру bodyFixVector, при переводе проекта в режим исследования.
 fixingVector = unlockVector:
fixingVector = unlockVector:Для проекции используется исходный вектор, положение которого относительно первого и второго звена может изменяться в процессе движения механизма.
Описание
При переводе проекта из режима редактирования в режим исследования для датчика выполняются следующие действия.
1. Создается точка Point*, которая прикреплена к звену Body и в исходном положении механизма совпадает с точкой Point.
2. Если именованный параметр fixingVector = lockVector: или его значение не задано, то создается вектор Vector*. Он прикреплен к звену Body и в исходном положении механизма совпадает с вектором Vector.
3. Если именованный параметр fixingVector = unlockVector:, то значением датчика является проекция на вектор Vector вектора перегрузки точки Point*.
Датчик можно использовать для определения интенсивности поля массовых сил в точке Point*. Для этого значение датчика необходимо умножить на 9.81 [м/с2] (ускорение свободного падения на поверхности Земли).
Для нахождения вектора перегрузки определяется ускорение свободного падения в точке (вектор
Вектор перегрузки определяется по формуле (см. рис. 2 ):
где
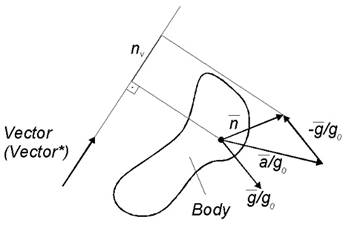 Рис. 2. Нахождение вектора перегрузки
|