2.2 Силовое взаимодействие двух тел произвольной геометрии
 Элемент описывает контактное взаимодействие между двумя телами произвольной геометрии. В качестве геометрии допускается использование точки, линии, поверхности и твердого тела. В результате формируется контактная пара, представленная одной из возможных комбинаций: точка – поверхность, точка – твердое тело, линия –поверхность, линия – твердое тело, поверхность – поверхность, поверхность – твердое тело, твердое тело – твердое тело. Силовое взаимодействие возникает при проникновении одной геометрии внутрь другой, а величина силы связана с глубиной проникновения (зазором в контактной паре).
Элемент описывает контактное взаимодействие между двумя телами произвольной геометрии. В качестве геометрии допускается использование точки, линии, поверхности и твердого тела. В результате формируется контактная пара, представленная одной из возможных комбинаций: точка – поверхность, точка – твердое тело, линия –поверхность, линия – твердое тело, поверхность – поверхность, поверхность – твердое тело, твердое тело – твердое тело. Силовое взаимодействие возникает при проникновении одной геометрии внутрь другой, а величина силы связана с глубиной проникновения (зазором в контактной паре). Считается, что, если зазор в контактной паре однозначно определить невозможно, например для пары точка – точка, то силовое взаимодействие учитываться не будет, вместо этого произведен расчет расстояния. Проверка такого силового элемента ошибки не выдаст, однако выдаст предупреждение, что зазор в такой паре невозможно однозначно определить, поэтому сила в сформированной контактной паре всегда равна нулю.
Обе выбранных геометрии обязательно должны быть прикреплены к звеньям механической системы. Контакт считается точечным для каждой пары топологических элементов двух выбранных пользователем геометрий. То есть, если твердое тело или линия, представленные точной геометрией имеет несколько граней, ребер или вершин, то ищется контакт для каждой возможной топологической пары. Таким образом можно считать, что контакт является локально точечным.
|
Схематический вид элемента представлен на рис. 5.
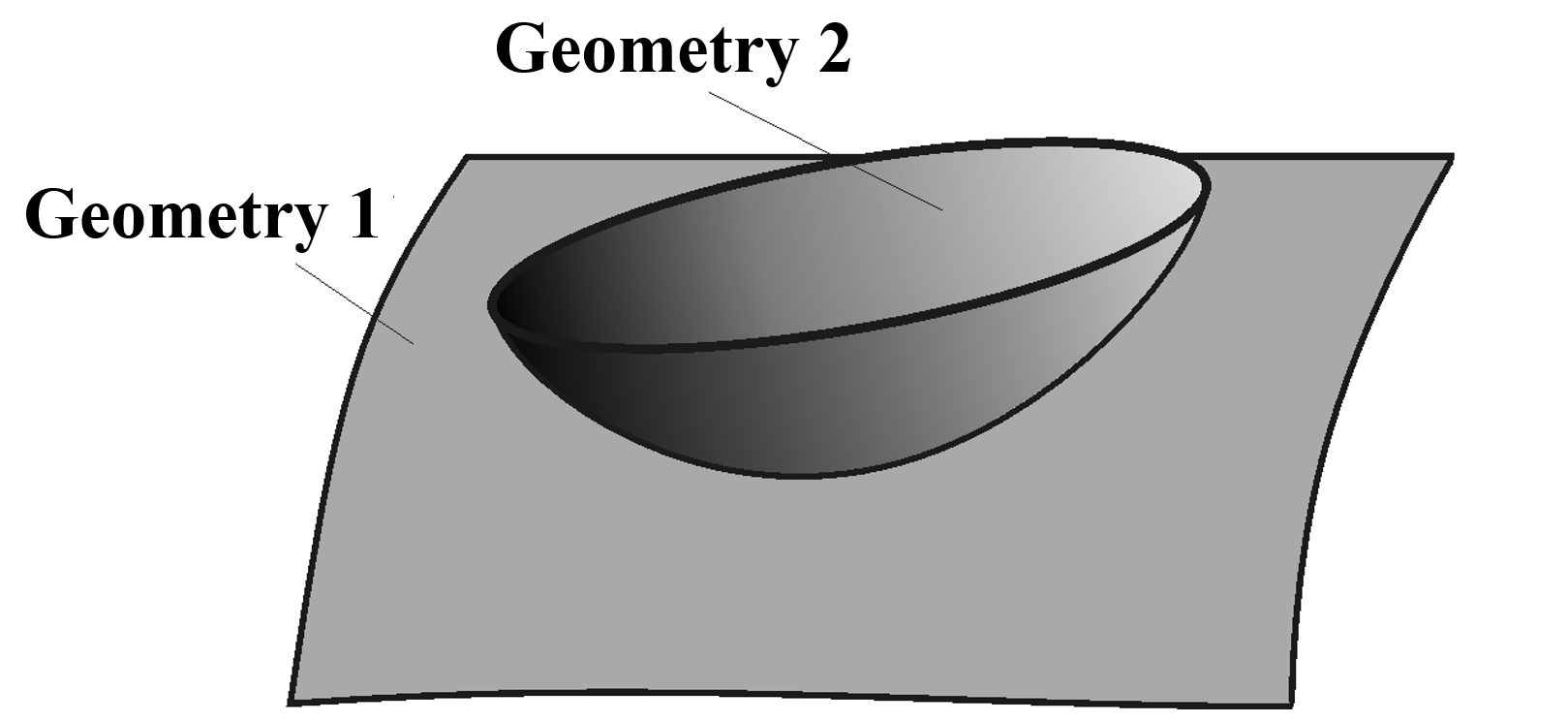
Рис. 5. Силовое взаимодействие двух тел произвольной геометрии
Синтаксис метода создания
сontactGG (Geometry1, Geometry2, ContactParameters, work=..., color=..., visible=...)
Позиционные обязательные параметры метода
solid/surface/plane/curve/point Geometry1
Первая геометрия контактного взаимодействия.
solid/surface/plane/curve/point Geometry2
Вторая геометрия контактного взаимодействия.
template ContactParameters
Шаблон параметров контактного взаимодействия.
Необязательные именованные параметры метода
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты».
Внутренние системные объекты
sensor gap [length]
Датчик зазора. Выдает знаковое расстояние в контактной паре, положительное при отсутствии контакта и отрицательное при его наличии.
sensor delta [length]
Глубина контакта. Если контакта нет, то датчик выдает нулевое значение.