2.5 Силовое взаимодействие линия-линия в плоскости
 Элемент описывает контактное взаимодействие между поверхностью и линией. Поверхность образуется заданной линией при ее перемещении в выбранном направлении. Результирующая поверхность является неограниченной вдоль этого направления. Поверхность является ориентируемой, направление нормали определяет сторону поверхности, для которой будет происходить контактное взаимодействие. Ориентация поверхности определяется вектором направления и направлением обхода линии. Посмотреть текущее направление нормали на виде проекта можно выделив силовой элемент в справочнике проекта. Поменять направление нормали можно изменив направление вектора на противоположное.
Элемент описывает контактное взаимодействие между поверхностью и линией. Поверхность образуется заданной линией при ее перемещении в выбранном направлении. Результирующая поверхность является неограниченной вдоль этого направления. Поверхность является ориентируемой, направление нормали определяет сторону поверхности, для которой будет происходить контактное взаимодействие. Ориентация поверхности определяется вектором направления и направлением обхода линии. Посмотреть текущее направление нормали на виде проекта можно выделив силовой элемент в справочнике проекта. Поменять направление нормали можно изменив направление вектора на противоположное. Силовое взаимодействие возникает при внедрении линии внутрь поверхности. Контакт представляется точечным, однако для составной линии количество идентифицируемы контактных взаимодействий может быть больше.
Схематический вид элемента представлен на рис. 2.
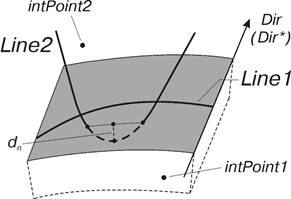
Рис. 2. Силовое взаимодействие линия-линия в плоскости
Линии обязательно должны быть прикреплены к звеньям механической системы. Звено, к которому прикреплена первая линия, будем называть первым звеном. Звено, к которому прикреплена вторая линия, будем называть вторым звеном.
Синтаксис метода создания
contactLLplane (Line1, Line2, Dir, ContactParameters, work=..., color=..., visible=...)
Обязательные позиционные параметры метода
line Line1
Линия, образующая первую поверхность силового взаимодействия.
line Line2
Линия, образующая вторую поверхность силового взаимодействия.
vector Dir
Исходный направляющий вектор. Копия этого вектора Dir* прикрепляется к первому звену и используется для расчета силового воздействия элемента.
template ContactParameters
Шаблон параметров контактного взаимодействия.
Необязательные именованные параметры метода
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты».
Внутренние системные объекты
sensor gap [length]
Датчик зазора. Выдает знаковое расстояние в контактной паре, положительное при отсутствии контакта и отрицательное при его наличии.
sensor delta [length]
Глубина контакта. Если контакта нет, то датчик выдает нулевое значение.