2.7 Силовое взаимодействие точка-линия «цилиндр-паз»
 Элемент описывает контактное взаимодействие между прямой, определяемой по точке и направлению, и пазом в плоскости перпендикулярной этой прямой. Паз определяется по линии и функции величины зазора.
Элемент описывает контактное взаимодействие между прямой, определяемой по точке и направлению, и пазом в плоскости перпендикулярной этой прямой. Паз определяется по линии и функции величины зазора. Схематический вид элемента представлен на рис. 6.
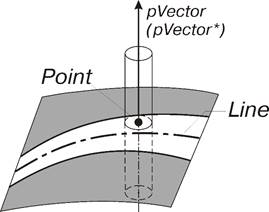
Рис. 6. Силовое взаимодействие точка-линия «цилиндр-паз»
Точка и линия обязательно должны быть прикреплены к звеньям механической системы. Звено, к которому прикреплена точка, будем называть первым звеном. Звено, к которому прикреплена линия, будем называть вторым звеном.
Также данный силовой элемент может быть использован для расчета контактного взаимодействия между цилиндром и пазом. Для этого необходимо определить необязательный именованный параметр RC – радиус цилиндра; заданные пользователем точка Point и вектор pVector при этом определяют ось цилиндра.
|
Синтаксис метода создания
contactPLgroove (Point, pVector, Line, Gap, ContactParameters, RC=…, BeginEdge=…, EndEdge=…, work=..., color=..., visible=...)
Обязательные позиционные параметры метода
point Point
Точка контактного взаимодействия; расположена на оси цилиндра.
vector pVector
Направляющий вектор линии контактного взаимодействия; определяет ось цилиндра. Копия этого вектора pVector* прикрепляется к первому звену и используется для расчета силового воздействия элемента.
line Line
function Gap [length]<[length]>
Функция величины зазора в зависимости от длины кривой.
template ContactParameters
Шаблон параметров контактного взаимодействия.
Необязательные именованные параметры метода
 RC = scalar [length]
RC = scalar [length]Радиус контактирующего цилиндра; точка Point и вектор pVector* при этом определяют ось цилиндра. Нулевому значению радиуса соответствует прямая. По умолчанию RC = 0 [m].
BeginEdge = [OpenEdge:/ClosedEdge:]
Флаг, определяющий поведение силового элемента в начальной точке линии. По умолчанию BeginEdge = OpenEdge:.
 BeginEdge = OpenEdge:
BeginEdge = OpenEdge:Открытый конец линии. При выходе за пределы линии силовой элемент выдает нулевое значение.
 BeginEdge = ClosedEdge:
BeginEdge = ClosedEdge:Закрытый конец линии. При выходе за пределы линии силовой элемент выдает нулевое значение в пределах окрестности начальной точки и ненулевое значение при выходе за пределы этой окрестности.
EndEdge = [OpenEdge:/ClosedEdge:]
Флаг, определяющий поведение силового элемента в конечной точке линии. По умолчанию EndEdge = OpenEdge:.
EndEdge = OpenEdge:Открытый конец линии. При выходе за пределы линии силовой элемент выдает нулевое значение.
EndEdge = ClosedEdge:Закрытый конец линии. При выходе за пределы линии силовой элемент выдает нулевое значение в пределах окрестности конечной точки и ненулевое значение при выходе за пределы этой окрестности.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты».
Описание
При переводе проекта из режима редактирования в режим исследования для элемента создается вектор pVector*, который прикрепляется к первому звену и в момент создания совпадает с вектором pVector.
Расчетная схема силового элемента полностью совпадает с расчетной схемой силового элемента «Силовое взаимодействие точка-поверхность» (force contactPS2). При этом в расчетной схеме элемента под точкой Point понимается точка Point* на оси цилиндра, ближайшая к линии Line, а точка проекции  вычисляется как пересечение кратчайшего перпендикуляра от точки Point* до линии Line с границей паза. Расчеты производятся в плоскости перпендикулярной оси цилиндра. Нормаль Normal определяется как внутренняя нормаль к границе паза в точке (см. рис. 7), таким образом, учитывается изменение функции зазора Gap в рассматриваемой области.
вычисляется как пересечение кратчайшего перпендикуляра от точки Point* до линии Line с границей паза. Расчеты производятся в плоскости перпендикулярной оси цилиндра. Нормаль Normal определяется как внутренняя нормаль к границе паза в точке (см. рис. 7), таким образом, учитывается изменение функции зазора Gap в рассматриваемой области.

Рис. 7. Определение точки проекции и нормали
При задании параметров силового элемента необходимо обратить внимание, что функция Gap задает не полуширину паза, а величину зазора между цилиндром и границами паза, соответствующего «идеальному» движению цилиндра вдоль центральной линии паза. Если пользователем определяется необязательный именованный параметр RC, функция зависимости полуширины паза от длины кривой определяется как сумма радиуса цилиндра и величины зазора: 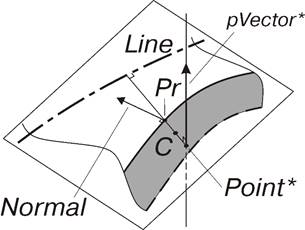 . Данный случай проиллюстрирован на рис. 5. Если параметр RC не переопределяется и, следовательно, равен 0, то полуширина паза будет совпадать с величиной зазора.
. Данный случай проиллюстрирован на рис. 5. Если параметр RC не переопределяется и, следовательно, равен 0, то полуширина паза будет совпадать с величиной зазора.
Отсутствие проекции точки Point на центральную линию паза свидетельствует о выходе за пределы линии. В этом случае поведение силового элемента определяется флагами BeginEdge и EndEdge. Если флаг, соответствующий ближайшей к точке Point крайней точке линии установлен как OpenEdge:, то контакта нет. В противном случае соответствующий край паза замыкается полуокружностью радиуса  , где
, где  – соответствующая крайней точке длина кривой, и контакт происходит с внешней поверхностью этой полуокружности.
– соответствующая крайней точке длина кривой, и контакт происходит с внешней поверхностью этой полуокружности.
Если центральная линия паза Line замкнута, то параметры BeginEdge и EndEdge не имеют смысла и не оказывают никакого влияния на расчет силового элемента.
Внутренние системные объекты
sensor gap [length]
Датчик зазора. Выдает знаковое расстояние в контактной паре, положительное при отсутствии контакта и отрицательное при его наличии.
sensor delta [length]
Глубина контакта. Если контакта нет, то датчик выдает нулевое значение.