5.1 Шина
 Данный элемент описывает силовое взаимодействие между колесом с эластичной шиной и деформируемой опорной поверхностью произвольного вида.
Данный элемент описывает силовое взаимодействие между колесом с эластичной шиной и деформируемой опорной поверхностью произвольного вида.Силовое взаимодействие осуществляется между грунтом и звеном обода колеса. Общий вид силового элемента представлен на рис. 1.
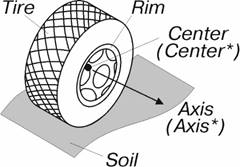
Рис. 1. Шина на деформируемой опорной поверхности
Синтаксис метода создания
tireSoil(Soil, Rim, Center, Axis, TireGeom, kHj=…, kPcr=…, valueAveragingSys=…, work=..., color=..., visible=...)
Обязательные позиционные параметры метода
road Soil
Имя грунта, по которому осуществляется качение колеса. Грунт определяется методом деформируемая опорная поверхность.
body Rim
point Center
Исходная точка, задающая центр колеса. Копия этой точки Center* прикрепляется к звену Rim. Точка Center* задает центр вращения колеса в процессе движения исследуемого механизма.
vector Axis
Исходный вектор, задающий направление нормали теоретической центральной плоскости вращения колеса. Копия этого вектора Axis* прикрепляется к звену Rim. Вектор Axis* задает направление нормали плоскости вращения колеса в процессе движения исследуемого механизма.
template TireGeom
Шаблон геометрии поверхности шины. Для шины на деформируемой опорной поверхности поперечный радиус обвода шины принимается равным бесконечности, а число цилиндрических сегментов шины принимается равным единице.
Необязательные именованные параметры метода
 kHj = scalar [-]
kHj = scalar [-]Относительный коэффициент дополнительного погружения в грунт за счет буксования. По умолчанию kHj = 1.
 kPcr = scalar [-]
kPcr = scalar [-]Относительный коэффициент несущей способности грунта. По умолчанию kPcr = 1.
 valueAveragingSys = scalar [-]
valueAveragingSys = scalar [-]Количество шагов интегрирования, используемых для усреднения значения системных датчиков объекта. Значение 0 соответствует отсутствию усреднения. По умолчанию valueAveragingSys = 3.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты» в книге «Описание объектов многокомпонентной механической системы».
Описание
В данном силовом элементе для определения характеристик пятна контакта и кинематических параметров движения колеса используется модель взаимодействия “колесо-дорога”, которая схематично представлена на рис. 2. В каждый момент времени в процессе численного интегрирования параметров движения определяется зона контакта шины с поверхностью качения. Эта зона, в общем случае, может быть неодносвязной и располагаться в пространстве произвольным образом. Затем, на основании анализа зоны контакта, определяется эквивалентная плоскость контакта, которая с наилучшим приближением создает такие же реакции, какие действуют на колесо на исходной поверхности контакта.
Эквивалентная плоскость контакта используется для определения кинематических параметров движения колеса. К таковым относятся угол наклона, угол увода, кривизна следа качения, и т.д.
В модели рассчитываются шесть составляющих силового воздействия деформируемой опорной поверхности на колесо с эластичной шиной:
− нормальная сила;
− боковая сила;
− продольная сила;
− стабилизирующий момент.
− восстанавливающий момент;
− момент сопротивления качению.
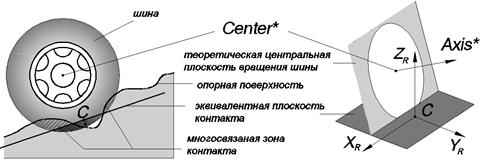
Рис. 2. Модель взаимодействия «колесо-дорога (грунт)»
Силовые факторы и кинематические параметры колеса выводятся в системе координат узла пятна контакта  (рис. 2). Этот узел определяется в каждый момент времени следующим образом:
(рис. 2). Этот узел определяется в каждый момент времени следующим образом:
1. Точка  , задающая центр узла, является геометрическим центром пятна контакта;
, задающая центр узла, является геометрическим центром пятна контакта;
2. Ось  перпендикулярна эквивалентной плоскости контакта и направлена от точки
перпендикулярна эквивалентной плоскости контакта и направлена от точки  в сторону центра колеса;
в сторону центра колеса;
3. Ось  совпадает с проекцией вектора нормали теоретической центральной плоскости вращения колеса на эквивалентную плоскость контакта;
совпадает с проекцией вектора нормали теоретической центральной плоскости вращения колеса на эквивалентную плоскость контакта;
4. Ось  дополняет узел до правой системы координат и лежит в эквивалентной плоскости контакта.
дополняет узел до правой системы координат и лежит в эквивалентной плоскости контакта.
Геометрия поверхности шины задается совокупностью четырехугольных площадок с учетом описанной геометрии шаблона. Взаимодействие каждой площадки с грунтом описано в разделе «Расчет взаимодействия элементарной площадки движителя с деформируемым основанием».
Внутренние системные объекты
sensor Rx [N]
Продольная реакция опорной поверхности.
sensor Ry [N]
Боковая реакция опорной поверхности.
sensor Rz [N]
Нормальная реакция опорной поверхности.
sensor Mx [Nm]
Восстанавливающий момент.
sensor My [Nm]
Момент сопротивления качению.
sensor Mz [Nm]
Стабилизирующий момент.
sensor h_max [m]
Максимальное полное погружение колеса в грунт относительно базовой поверхности. При отсутствии контакта с опорной поверхностью значение датчика равно 0 [m].