2.8 Силовое взаимодействие точка-линия «цилиндр-линия на цилиндрической поверхности»
 Элемент описывает контактное взаимодействие между прямой и линией на цилиндрической поверхности. Прямая определяется по заданным пользователем точке и направлению. Цилиндрическая поверхность определяется по заданным пользователем линии (направляющая) и вектору (образующая). Также вектор линии определяет часть образуемой цилиндрической поверхности, соответствующую наличию контакта, а именно – вектор направлен внутрь области контакта. На точку контакта действуют следующие силы:
Элемент описывает контактное взаимодействие между прямой и линией на цилиндрической поверхности. Прямая определяется по заданным пользователем точке и направлению. Цилиндрическая поверхность определяется по заданным пользователем линии (направляющая) и вектору (образующая). Также вектор линии определяет часть образуемой цилиндрической поверхности, соответствующую наличию контакта, а именно – вектор направлен внутрь области контакта. На точку контакта действуют следующие силы:− Сила упругой нормальной реакции со стороны поверхности, ее направление совпадает с направлением нормали поверхности в окрестности внедрения точки.
− Сила нормального демпфирования, вектор силы коллинеарен вектору силы нормальной реакции.
− Сила трения, которая возникает при движении точки вдоль поверхности.
Схематический вид элемента представлен на рис. 8.
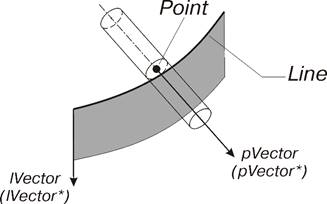
Рис. 8. Силовое взаимодействие точка-линия
«цилиндр-линия на цилиндрической поверхности»
Точка и линия обязательно должны быть прикреплены к звеньям механической системы. Звено, к которому прикреплена точка, будем называть первым звеном. Звено, к которому прикреплена линия, будем называть вторым звеном.
Данный силовой элемент может быть использован и для расчета контактного взаимодействия между цилиндром и линией на цилиндрической поверхности. Для этого необходимо определить необязательный именованный параметр RC – радиус цилиндра; заданные пользователем точка Point и вектор pVector при этом определяют ось цилиндра.
Синтаксис метода создания
contactPLcyl (Point, pVector, Line, lVector, contactParams, D_max=…, RC=…, work=..., color=..., visible=...)
Обязательные позиционные параметры метода
point Point
Точка силового взаимодействия.
vector pVector
Направляющий вектор линии контактного взаимодействия; определяет ось цилиндра. Копия этого вектора pVector* прикрепляется к первому звену и используется для расчета силового воздействия элемента.
line Line
Линия силового взаимодействия. Направляющая цилиндрической поверхности.
vector lVector
Вектор, направленный внутрь области контакта. Образующая цилиндрической поверхности. Копия этого вектора lVector* прикрепляется ко второму звену и используется для расчета силового воздействия элемента.
template contactParams
Шаблон параметров контактного взаимодействия. Шаблон должен иметь один из следующих допустимых типов: ПКВ1, ПКВ2, ПКВ3, ПКВ4, ПКВ5.
Необязательные именованные параметры метода
 D_max = scalar [length]
D_max = scalar [length]Предельная глубина контакта. При глубине контакта, превышающей значение этого параметра, силы взаимодействия между точкой и линией обнуляются. По умолчанию D_max = 1 [m].
 RC = scalar [length]
RC = scalar [length]Радиус контактирующего цилиндра; точка Point и вектор pVector* при этом определяют ось цилиндра. Нулевому значению радиуса соответствует прямая. По умолчанию RC = 0 [m].
work =..., color =..., visible =...
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты».
Описание
При переводе проекта из режима редактирования в режим исследования для элемента выполняются следующие действия:
1. Создается вектор pVector*, который прикрепляется к первому звену и в момент создания совпадает с вектором pVector.
2. Создается вектор lVector*, который прикрепляется ко второму звену и в момент создания совпадает с вектором lVector.
Расчетная схема силового элемента полностью совпадает с расчетной схемой силового элемента «Силовое взаимодействие точка-поверхность 2» (force contactPS2). При этом в расчетной схеме элемента под точкой Point понимается точка Point* на оси цилиндра, из которой может быть опущен общий перпендикуляр на линию Line. Если между осью цилиндра и линией Line можно провести несколько общих перпендикуляров, то выбирается точка Point* – ближайшая к точке Point. Под точкой  понимается соответствующая точка на линии Line – вторая вершина общего перпендикуляра. Нормаль Normal коллинеарна общему перпендикуляру и направлена вовне относительно области контакта (см. рис. 9).
понимается соответствующая точка на линии Line – вторая вершина общего перпендикуляра. Нормаль Normal коллинеарна общему перпендикуляру и направлена вовне относительно области контакта (см. рис. 9).
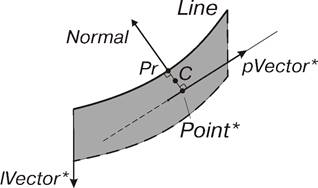
Рис. 9. Определение точки проекции и нормали
Внутренние системные объекты
sensor distance [length]
Глубина контакта. Если контакта нет или превышена предельная глубина контакта, то датчик выдает нулевое значение.